Fluid Force Identification Acting on Snake-like Robots Swimming in Viscous Fluids
Abstract
A snake-like robot can move in not only the dry ground but also various viscous environments of water, mud, and clay by exhibiting undulating motions. To construct the numerical model including the fluid-structure interaction for the snake-like robot under the above-mentioned environments, the added mass and drag coefficients for the snake-like robot must be identified via experimentation because they depend on the shape of the body, the roughness of the skin, and the viscosity of the fluid.
In this work, firstly, we performed experiments in which a snake-like robot of eight links exhibits swimming motions in three fluids of different kinematic viscosities, and we
measured its joint positions during swimming. Subsequently, we proposed a numerical model of the snake-like robot swimming in fluids with a wide range of viscosities, and
the identification method of some unknown fluid force parameters using an unscented Kalman filter. After that, we identified the unknown added mass and drag coefficients for the fluid force acting on the snake-like robot by using the proposed method.
Then, we clarified that the appropriate drag model is the inertia drag model for water with small viscosity and the viscous drag model for oil which is a highly viscous fluid. Moreover, we confirmed that the undulation increased the tangential drag force along the body by 1.4 times. The position and velocity of the center of gravity of the snake-like robot, calculated using the numerical models, also agreed with the experimental results.
Experimental setup
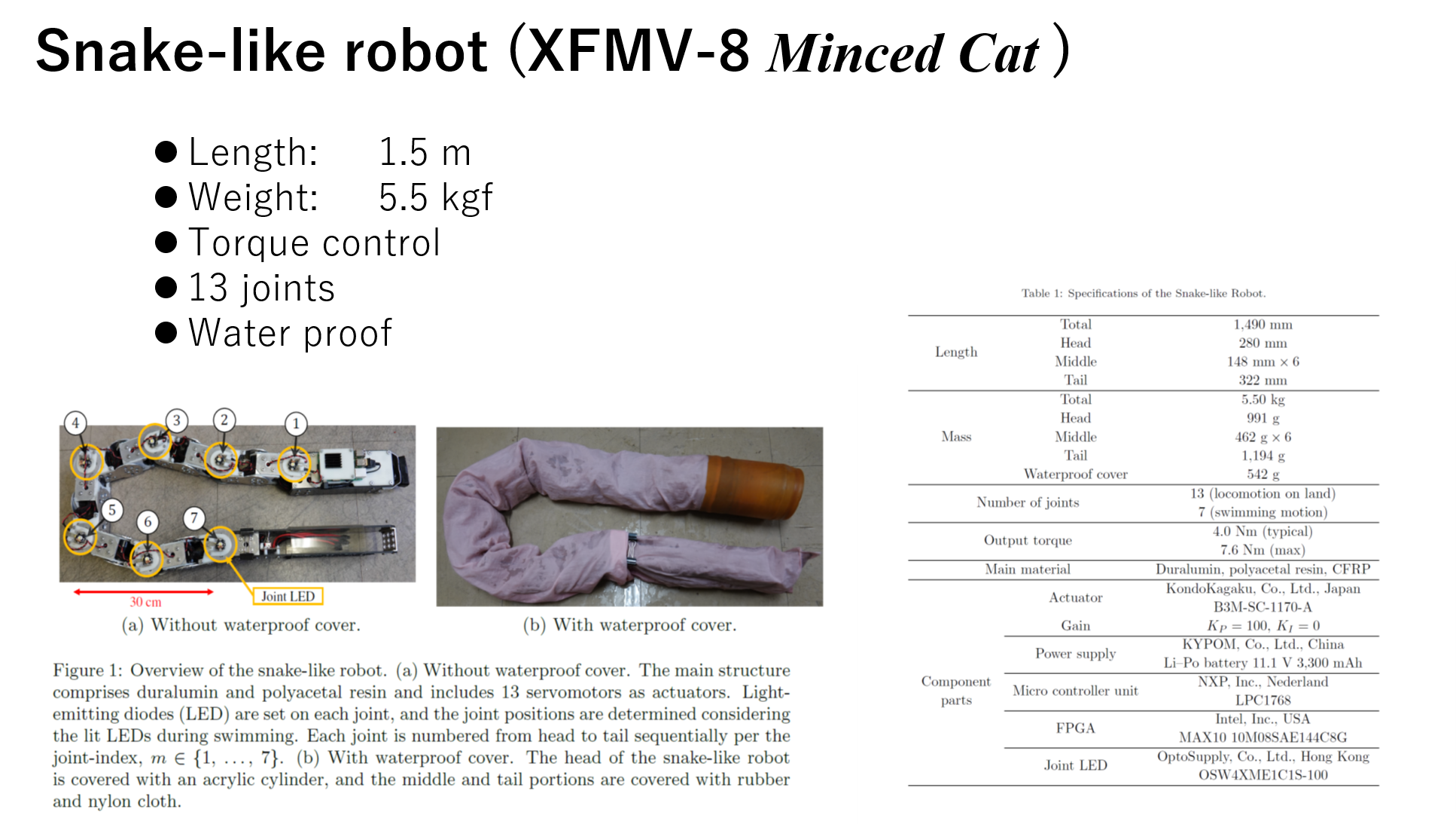
The main structure of the robot comprises duralumin, polyacetal resin, and carbon-fiber-reinforced plastic (CFRP), and it includes 13 servomotors (B3M-SC-1170-A, KondoKagaku, Co., Ltd., Japan) as the joint actuators. Because the swimming motion with lateral undulation is a 2D motion, 7 of 13 servomotors are used. Additionally, the snake-like robot has 3300 mAh Li–Po batteries and can move without a wired external power supply, which is otherwise common among swimming snake-like robots.
 3D view
3D view
Procedure for fluid force identification
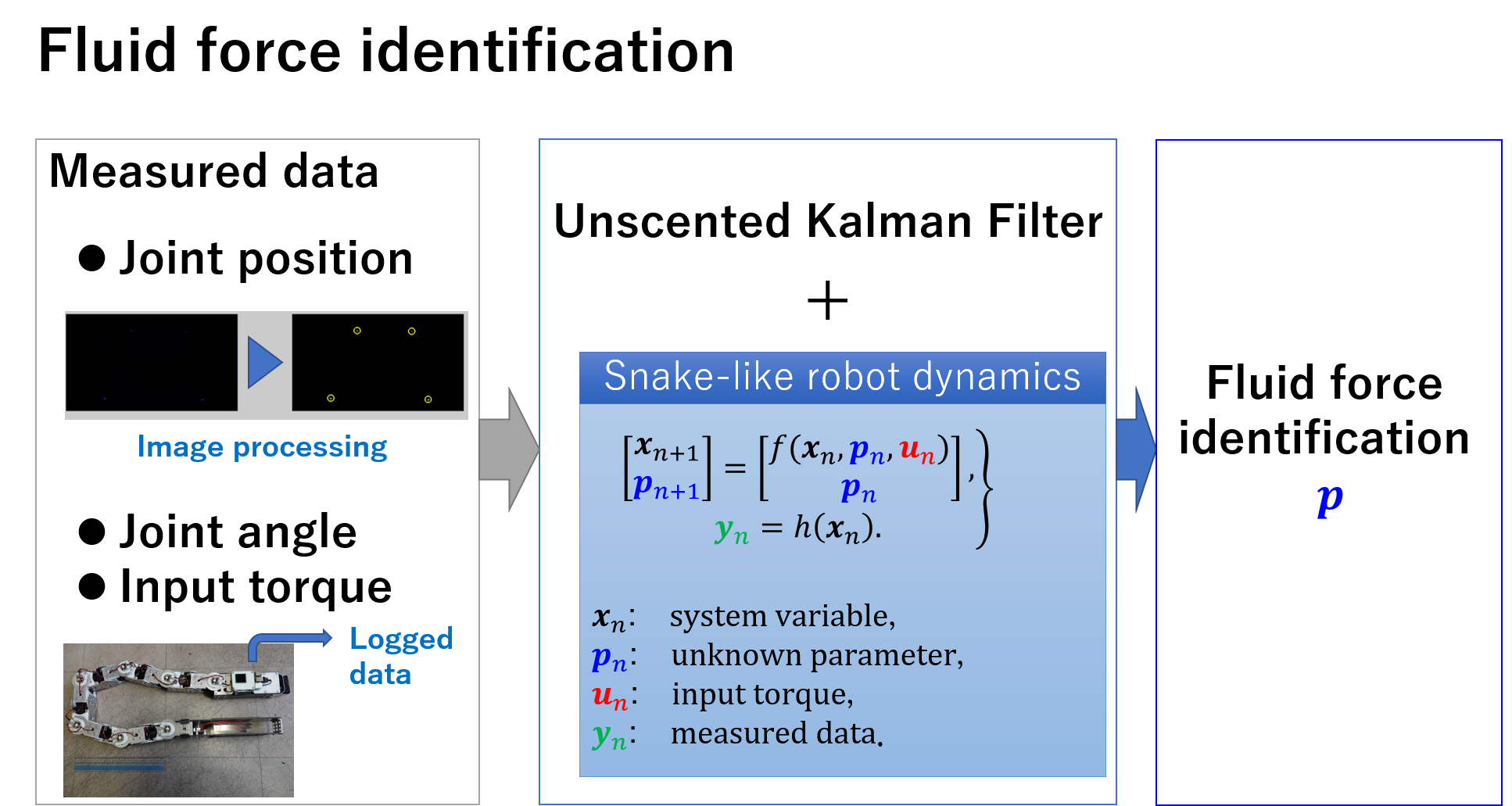
We proposed a numerical model of the snake-like robot swimming in fluids with a wide range of viscosities, and the identification method of some unknown fluid force parameters using an unscented Kalman filter (UKF) (Julier et al., 1995; Julier and Uhlmann, 2004). After that, we identified the unknown added mass and drag coefficients for the fluid force acting on the snake-like robot by using the proposed method
Identified results during swimming motion
The following figure represents the time series of COG velocity during swimming in water, oil I, and oil III at swimming frequencies 0.2 Hz and 0.5 Hz, respectively. Red and blue thin solid lines with markers represent the measured COG velocities. Because the measured velocity contained noise, the data processed using a fast Fourier transform (FFT) filter with a cutoff frequency of 2.0 Hz are represented by thick dashed lines. The COG velocities obtained from simulations of the numerical model constructed under the identified drag coefficients are shown by thick solid lines
Because the time at which the snake-like robot begins swimming is a transient response, discrepancies were observed between the measured and simulation results; however, when the robot developed sufficient swimming speed, the error between the measured and simulation results was small.

Demonstration movie
Related Publications
- A. Yamano, K. Shimizu, M. Chiba and H. Ijima, Fluid force identification acting on snake-like robots swimming in viscous fluids, Journal of Fluids and Structures, Vol. 106 (2021).
- A. Yamano, T. Kimoto, Y. Inoue and M. Chiba, Optimal swimming locomotion of snake-like robot in viscous fluids, Journal of Fluids and Structures, Vol. 123 (2023).[Preprint: Open access]
Grants
- JSPS, Grant-in-Aid for Young Scientists, 20K14699, 2020-2021.
- JSPS, Grant-in-Aid for JSPS Research Fellow (PD), 17J03297, 2017-2019.