Efficient Rolling Motion for Snake-like Robots Utilizing a COG Shift
 3D view
3D view
Abstract
Snake-like robots have attracted attention as robots that can travel over rough terrain where wheeled mobility mechanisms cannot. Previous research on snake-like robots has mainly focused on the biological movement of snakes; therefore, the issue of power consumption caused by driving a large number of actuators still remains unaddressed. In this study, we propose an efficient movement method using the movement of the center of gravity (COG) as a solution to the above-mentioned problem. In the proposed method, the snake-like robot is first transformed into a wheel shape, and then, some motors of the joint are moved to shift the COG and rotate the robot. Therefore, good movement efficiency can be achieved on leveled terrain by the rolling movement, and a snake-like undulating drive with high running performance can be selected on underwater and rough terrain. To realize the proposed movement method, we propose a method for switching between the rotational movement and undulation drive modes. However, the rolling motion with a COG shift needs a design of an appropriate orbit of the eccentric COG and timing of the motion stage transition. In this study, we demonstrate the rolling motion design with a simplified equation of motion. Next, experiments are conducted to verify the traveling efficiency in the proposed rolling mode, and it is proven that the method can achieve twice the traveling efficiency of the undulating motion.
Experimental setup
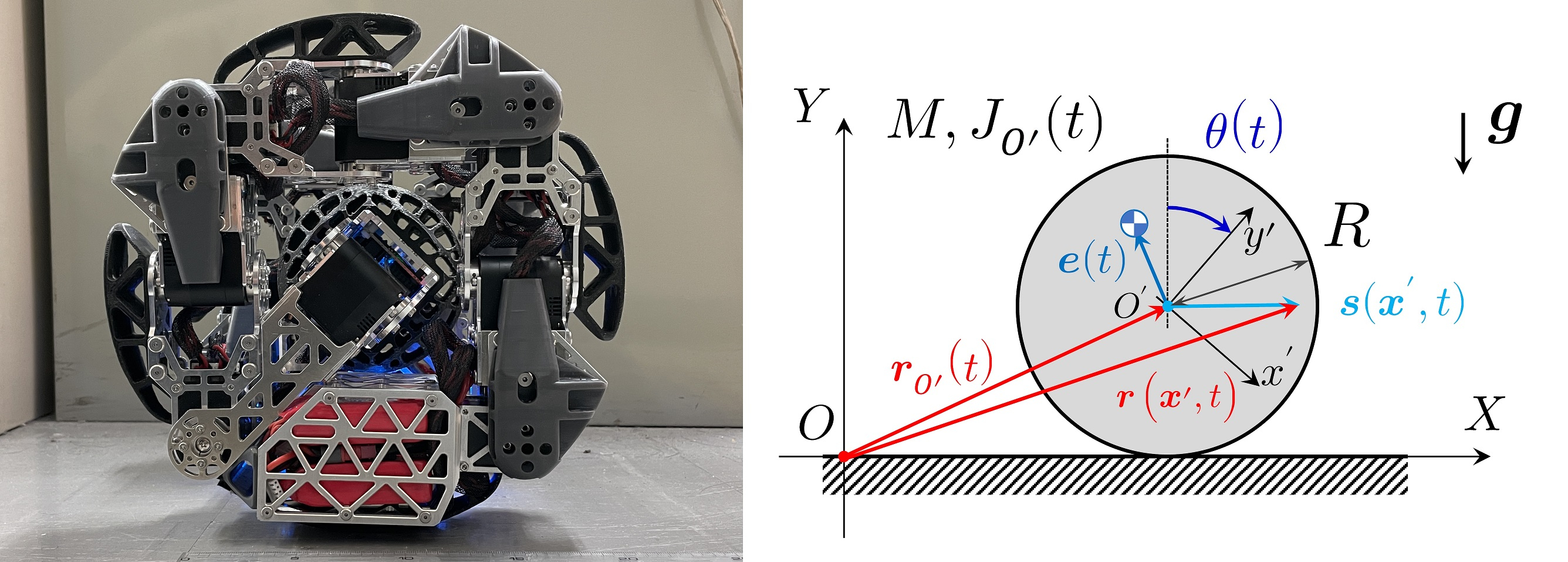
This snake-like robot is composed of duralumin and an ABS resin, and 16 servomotors (B3M-SC-1170-A, KondoKagaku, Co., Ltd., Japan) are mounted as joint actuators. The servomotors are arranged such that the rotation axes are staggered by 90° to enable three-dimensional motion. In addition, the robot is powered by 5200 mAh Li-Po batteries so that it can operate without a wired external power supply, which is often seen in other snake-like robots. Furthermore, the waterproof and dustproof properties are maintained by the waterproof cover made of rubber and nylon. Servomotors transform the head and tail sections into a wheel shape using position control with PID control; subsequently, the snake-like robot is transformed into a shape of parallelized two wheels. The head and tail are designed to be on the same side when the snake-like robot is transformed into a wheel shape. Because the head and tail are heavier than other links, they are positioned directly below the transformed structure owing to gravity.
Rolling motion with the COG shift
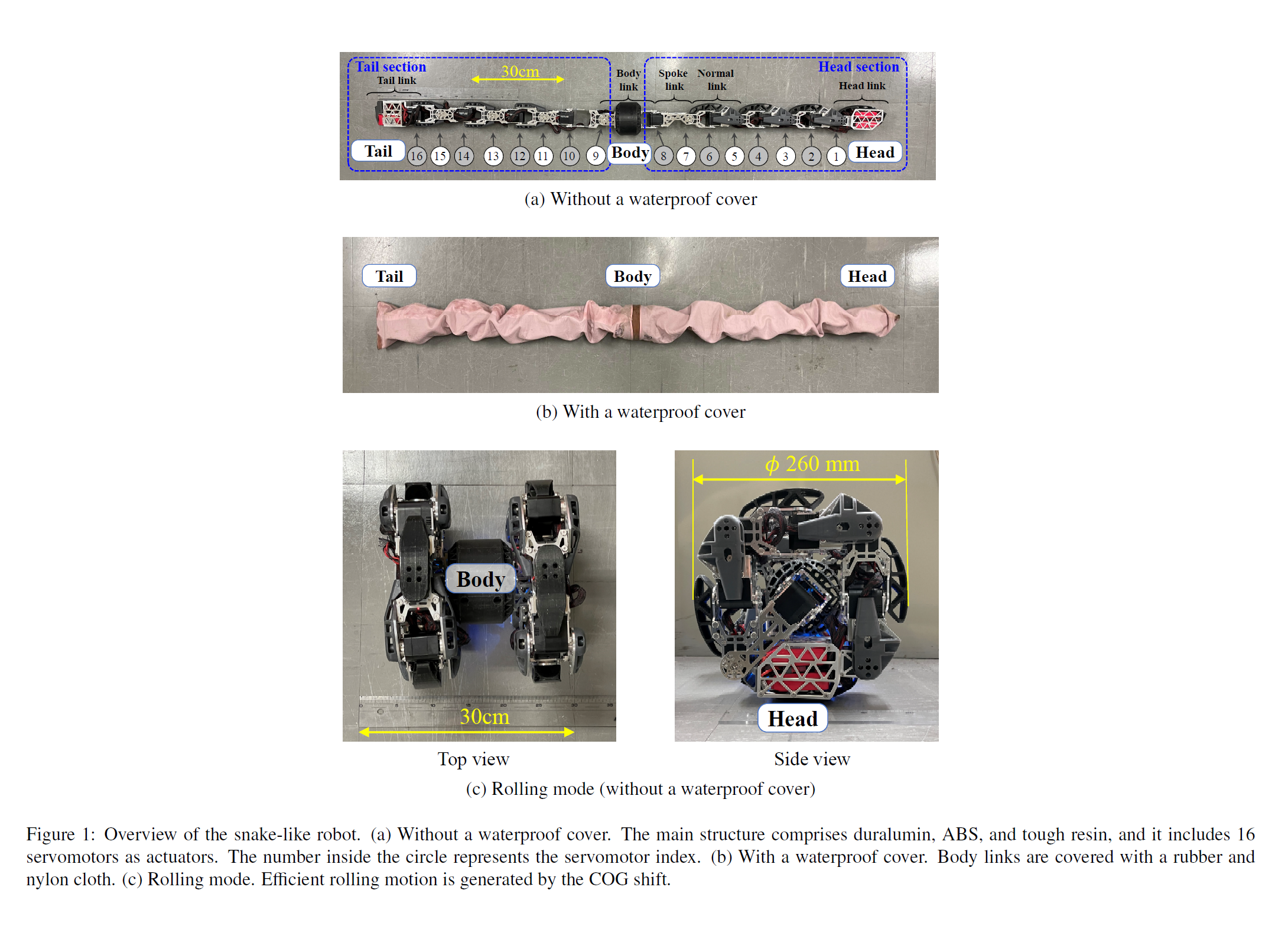
We propose the rolling motion with a COG shift as more efficient motion than other locomotions. Bottom figure demonstrates the proposed rolling motion with the COG shift. Bottom figure(a) illustrates the procedure of the rolling motion. The procedure of this motion is divided into four stages as follows:
- Kick stage: The head or tail section is moved to kick the ground, to generate the rolling motion.
- COG shift stage I: A heavier head or tail link is moved forward to move the COG forward.
- COG shift stage II: A heavier head or tail link is moved above to move the COG forward.
- Rolling stage: Rolling motion is generated by gravity.
In this motion, the body is formed as a wheel, and the rolling motion is generated by gravity acting on the eccentric COG. Therefore, the traveling efficiency is better than other undulating locomotions which need to drive all servomotors. Moreover, Bottom figure (b) illustrates the backward and forward rolling motions. The robot can move forward by moving the head link and backward by moving the tail link.
Comparison of Traveling Efficiency
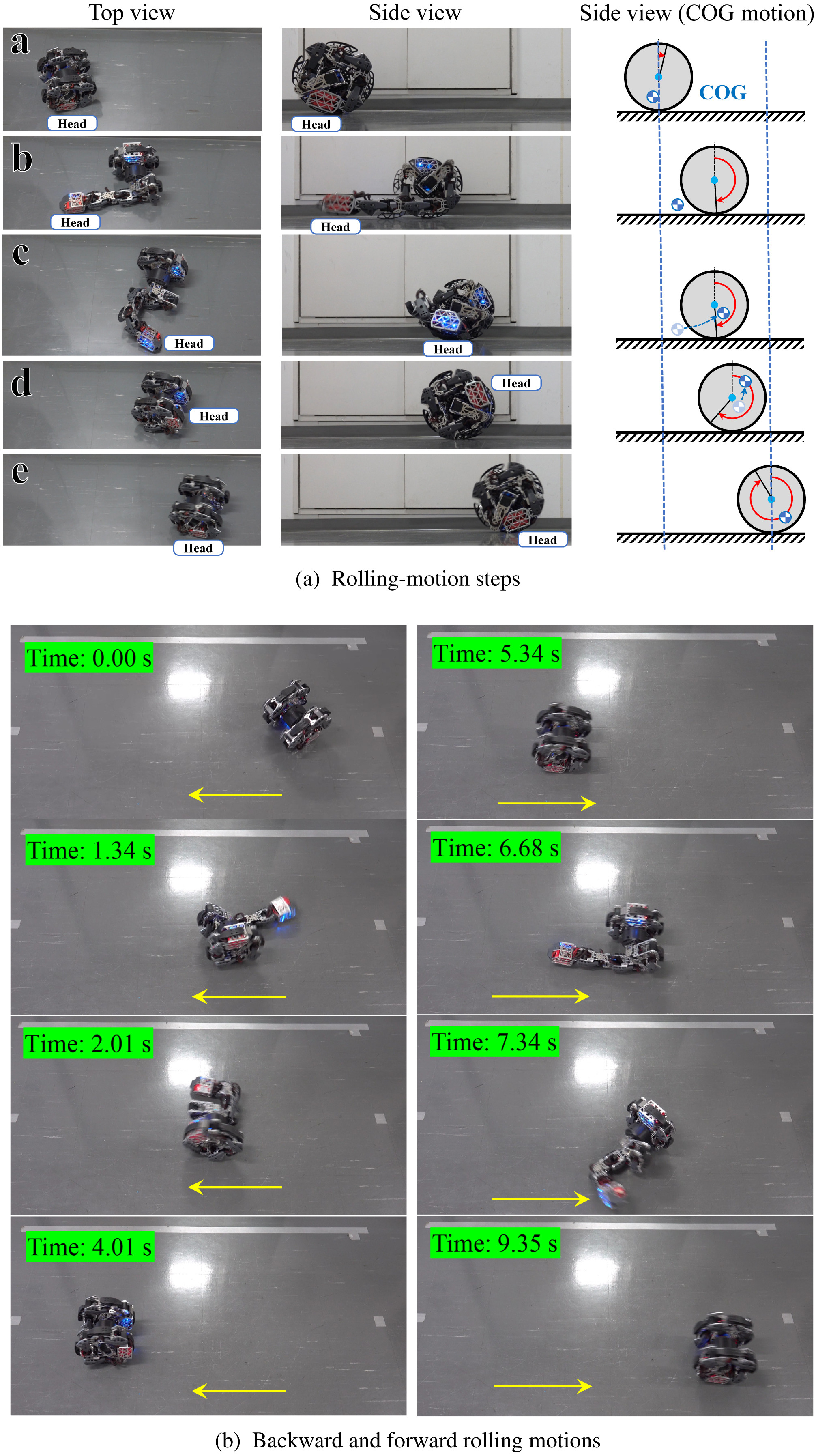
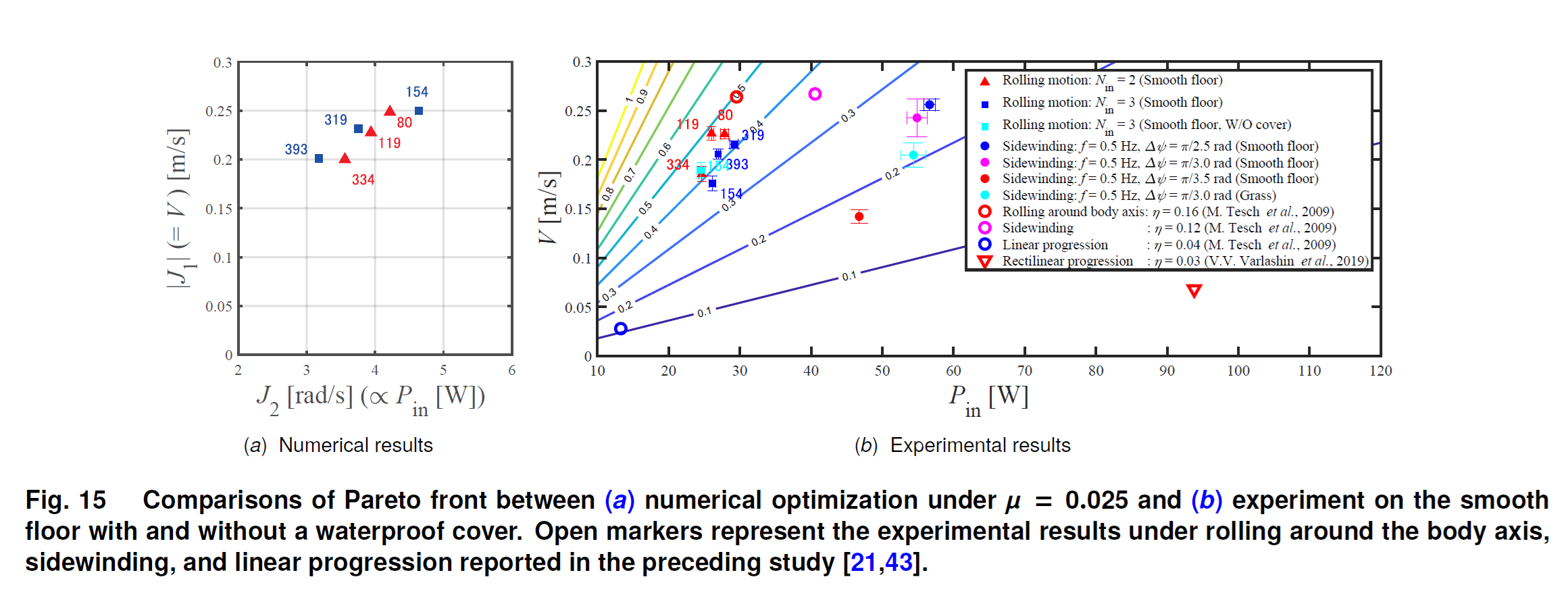
The results of the experimental evaluation of the power consumption and the traveling velocity on the smooth floor with and without a waterproof cover, based on the driving conditions obtained using the multiobjective optimization calculations presented, are shown in the following figure. The number near the markers represents the index of the individual on the Pareto front in NSGA-II. Additionally, the light colored marker shows the experimental results without a waterproof cover. Here, on the grass, the free-rolling by gravity stopped midway, so the rolling motion due to the COG shift could not be achieved. The error bar in the experimental results represents the standard deviation of the time-averaged consumed power and traveling velocity with the measured data pertaining to the ten trials.
The contour lines represent the traveling efficiency. Compared to the undulating locomotion including sidewinding, rolling around the body axis, and linear progression in the experimental results, which is a conventional method for the snake-like robot, the proposed rolling motion has a traveling efficiency, which is greater than that of the undulating locomotion under all driving conditions. Thus, on flat terrains, the integration of the proposed drive method allows the snake-like robot to operate for a longer period than conventional snake-like robots with wireless communication, resulting in a large battery capacity limitation. Moreover, high off-road performance on uneven ground can be achieved by using the undulating mode.
Demonstration movie
Related Publications
- A. Yamano, Y. Ikeda, K. Imai and M. Chiba, Efficient Rolling Motion for Snake-like Robots Utilizing Center of Gravity Shift, Mechatronics, Vol. 94 (2023).
- A. Yamano, T. Kimoto and M. Chiba, Design of Rolling Motion for Snake-like Robots using Center-of-Gravity Shift, Journal of Mechanisms and Robotics, Vol. 17, No. 6 (2025).[Preprint: Open access]