研究紹介
本研究室では,「システム制御工学」ならびに「非線形ダイナミクス」に関して,基礎から応用まで幅広く研究しています.ここでは,最近の研究内容の一部を紹介します.
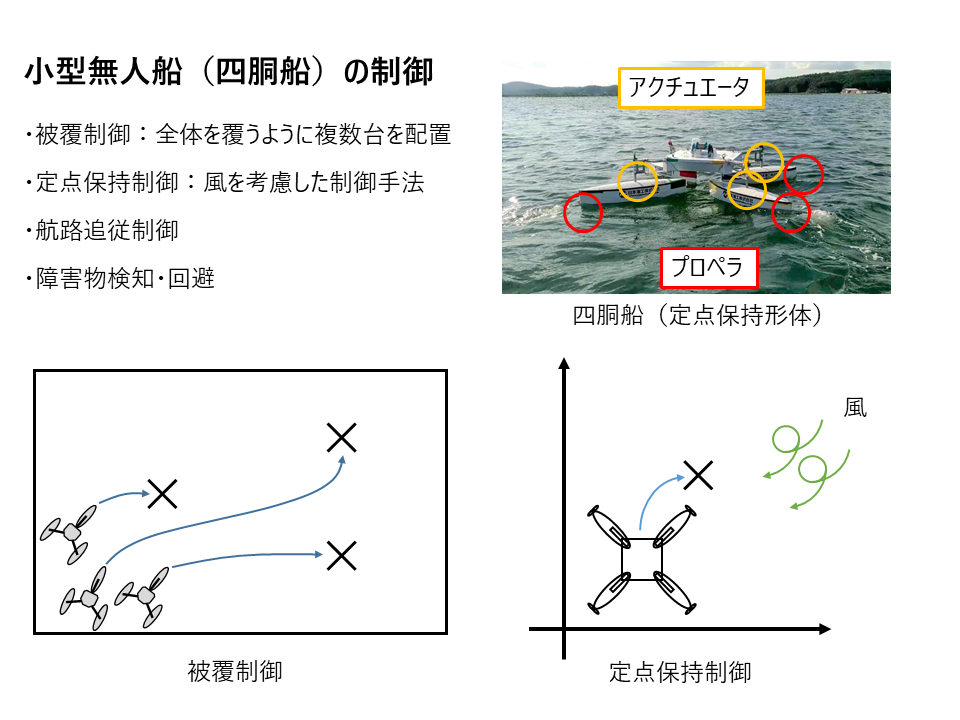
小型無人船の制御
主に二瓶泰範准教授(大阪公立大)と日本海工さんが中心に開発した小型の無人船舶(ロボセン)の制御関連の研究開発をおこなっています.制御面では様々なチャレンジ事項があります:例えば,1)海洋上は外乱の影響がつよい(風と波,潮流),2)故障検知・耐故障性が必須(水草・網など浮遊物がプロペラに絡まる),3)障害物(養殖用のブイ,作業船)の検知と回避,4)安定した自己位置推定(GPS外部信号の喪失などに対する備えが必要),5)制約条件下での最適な計測ポイントの巡回,6)複数台での協調巡回, 7)ドローンとの連携,などです.
References
- 二瓶泰範,増田憲和,原尚之,
四胴型自動航行船の養殖場への展開,
システム/制御/情報, vol. 65, no. 1, pp. 13-20 (2021) - K. Mukai, N. Hara, and K. Konishi,
Experimental validation of propulsion fault detection system using moving horizon estimation in quad-maran unmanned vessel,
SICE Journal of Control, Measurement, and System Integration, vol. 14, no.2, pp. 39-42 (2021) (※チャレンジ事項2)の関連研究) - 向井航太, 原尚之, 小西啓治,
小型無人船におけるセマンティックセグメンテーションによる単眼カメラ画像からの障害物検知の検討,
システム制御情報学会論文誌, vol. 34, no. 12, pp. 319-321 (2021) (※チャレンジ事項3の関連研究)
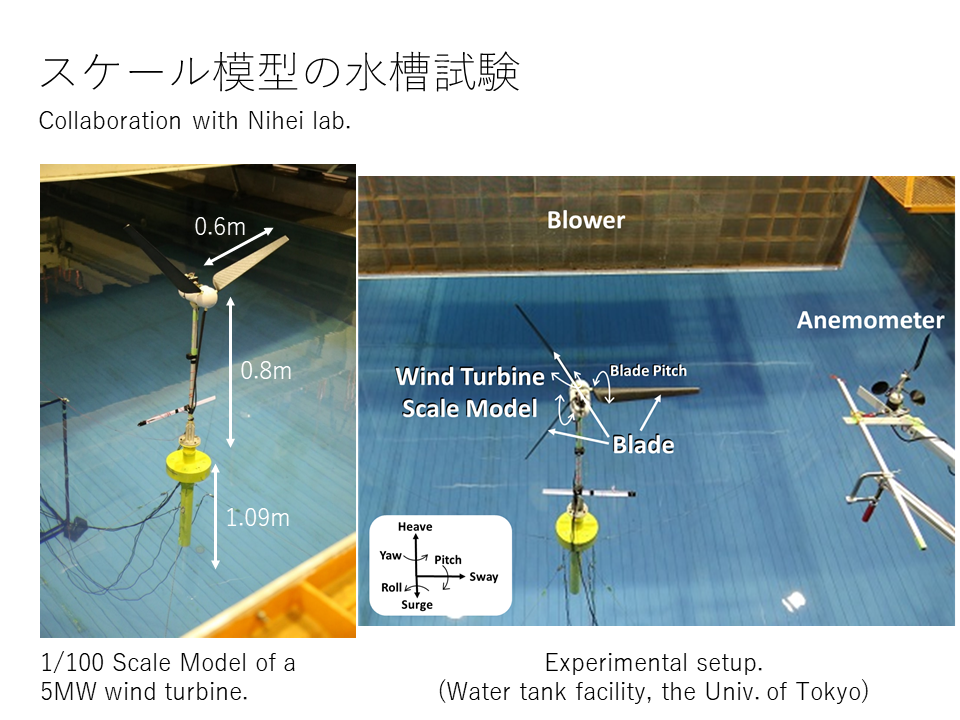
洋上風力発電システムの制御
日本はエネルギー資源をもたないといわれていますが,世界有数の大きさの排他的経済水域をもち,海洋には膨大な再生可能エネルギー(洋上風力,波力,潮流など)が存在しています.これらを,経済的に継続可能な形で発電やエネルギー源(水素の生成など)などに利用できれば,低炭素社会の実現,エネルギーの安全保障などの観点で社会に貢献できるはずです。欧州では大規模な洋上風力発電が展開されていますが,着床式の設置が可能な北海沿岸の浅水域(<30m)に限られます.日本のように限られた浅水域しかもたないような場合,経済的な観点から浮体式の洋上風力発電の展開が期待されます.主に,浮体式の洋上風力発電システムの制御系 (ブレードピッチ,発電機トルク) の開発をおこなっており,システム制御工学分野で開発された高度制御手法を導入することで,制御系の性能改善を目指しています.制御系設計は,動作点周りの線形システムに基づきおこなうことが多いですが,その性能評価では,高精度なシミュレータ(National Renewable Energy Laboratory (NREL)のFAST)やスケール模型を使っています.また,複数の風車が設置されたウィンドファームでは,風車同士の相互干渉にが存在するため,ウィンドファーム全体での運用では,風車同士の協調的な運用が求めらます.ウィンドファームの最適な運用についても研究を進めていく予定です.
References
- 津屋朋花,原尚之,小西啓治,
風速の予見情報を用いた浮体式洋上風車の個別ブレードピッチ角制御,
電気学会論文誌C, vol. 142, no. 9, pp. 1008-1020 (2022) - T. Tsuya, N. Hara, and K. Konishi,
Add-on preview compensator for GSPI-based blade pitch controller in floating offshore wind turbines,
Proc. of the 2021 5th IEEE Conference on Control Technology and Applications, pp. 44-50 (Online, 2021) - N. Hara and K. Konishi,
A Preliminary Study on Power Maximization of Wind Farm Using Distributed Optimization,
Proc. of SICE Annual Conference, pp. 1681-1684 (Hiroshima, Japan, 2019) - N. Hara, S. Tsujimoto, Y. Nihei, K. Iijima, and K. Konishi,
Experimental validation of model-based blade pitch controller design for floating wind turbines: system identification approach,
Wind Energy, vol. 20, no.7, pp. 1187-1206 (2017) - 原尚之,大塚敏之,
浮体式洋上風力発電における制御,
システム/制御/情報 vol. 60, no. 9, pp. 388-395 (2016)
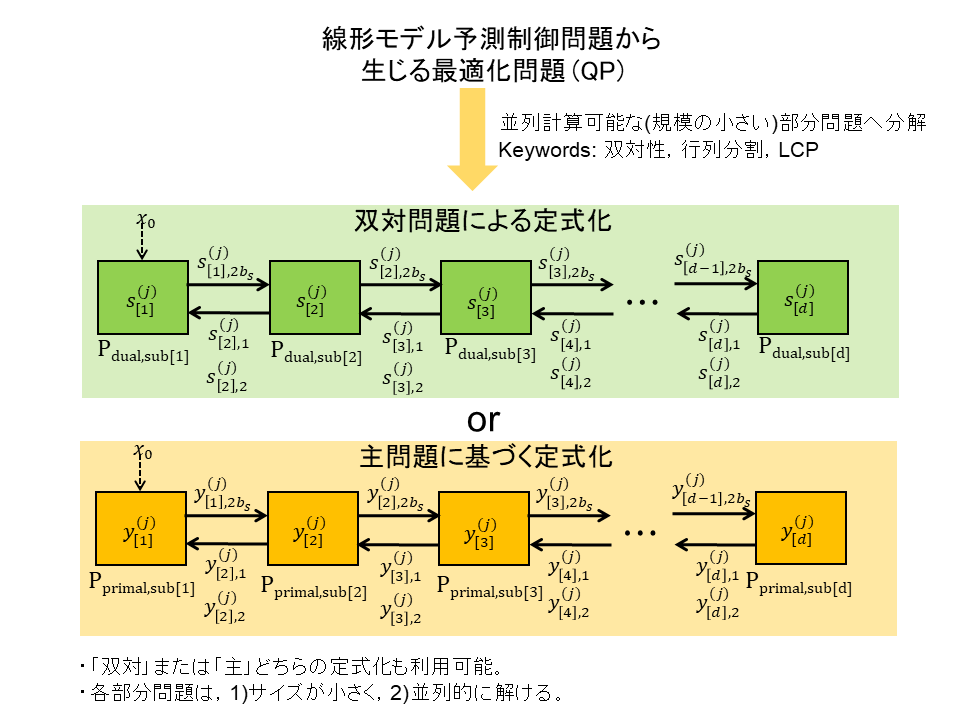
モデル予測制御
フィードバック制御の1手法で,制約条件を有する多入力・多出力系に対する有力な制御法として知られています.線形システムに対する標準的なモデル予測制御問題は,各制御周期で二次計画問題(Quadratic Programming:以下QP)を解くことに帰着されます.このQPを,並列処理可能な小規模な部分問題(これもQP)に分割する方法を開発しています.例えば,大規模なひとつのQP問題が計算機資源やソルバーの制限で処理できない場合などに,小規模なQP問題に分割して処理(解く)するなどの使い道が想定されます.今後は,安価な複数のシングルボードコンピュータへの分割実装や,FPGA (Field Programmable Gate Array)での並列実装および理論的な部分の細部を詰めることを予定しています.
References
- S. Yamamoto, N. Hara, and K. Konishi,
Parallel model predictive control method with variable prediction horizon for low-resource IoT devices –Validation with micro: bit– (I),
Proc. of SICE Annual Conference, pp. 686-689, FrPMT1.1 (Mie/Hybrid, Japan, 2023) - N. Hara and K. Konishi,
On the Use of Intermediate Solutions in Parallel Model Predictive Control Based on Matrix Splitting,
Proc. of 2017 Asian Control Conference, pp. 2280-2285 (Gold Coast, Australia, 2017) - N. Hara and K. Konishi,
Primal Formulation of Parallel Model Predictive Control,
Proc. of 2017 17th International Conference on Control, Automation and Systems, pp. 99-103 (Jeju, Korea, 2017) - N. Hara and K. Konishi,
Parallel model predictive control for input constrained linear systems,
Proc. of 55th IEEE Conference on Decision and Control, pp. 2351-2357 (Las Vegas, USA, 2016)
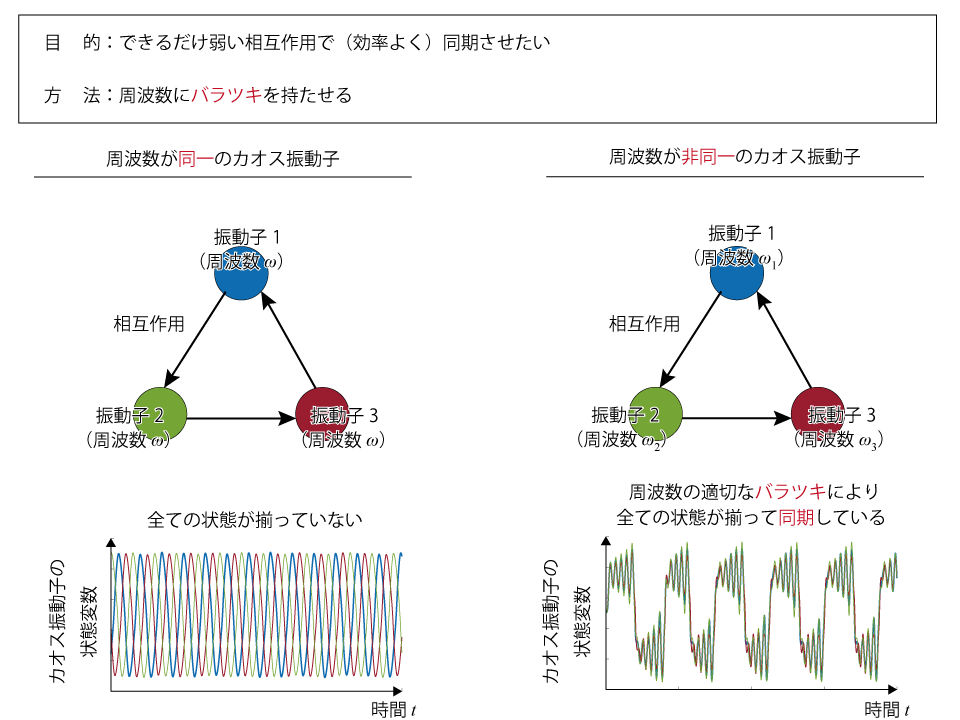
同期現象の制御
蛍の集団発光に代表される振動子の同期現象は,様々なところで見られます.例えば,電力ネットワークにおいては,日本中の発電機が1秒間に50回または60回という速さで同期しながら回転することで,私たちは安定した電力供給を受けています.また,私たちの心臓では,固有の周期をもつ多数のペースメーカー細胞が,相互作用し,同じ速さでリズムを刻むことで心臓の拍動を生み出しています.本研究室では,こうした同期現象を効率的に発生させる方法について,理論的および実験的に研究を進めています.特に,振動子の周波数の不均一性と同期現象との関係性に興味があります.
References
- Y. Sugitani, Y. Zhang, and A.E. Adilson,
Synchronizing chaos with imperfections,
Physical Review Letters, vol. 126, p. 164101 (2021)
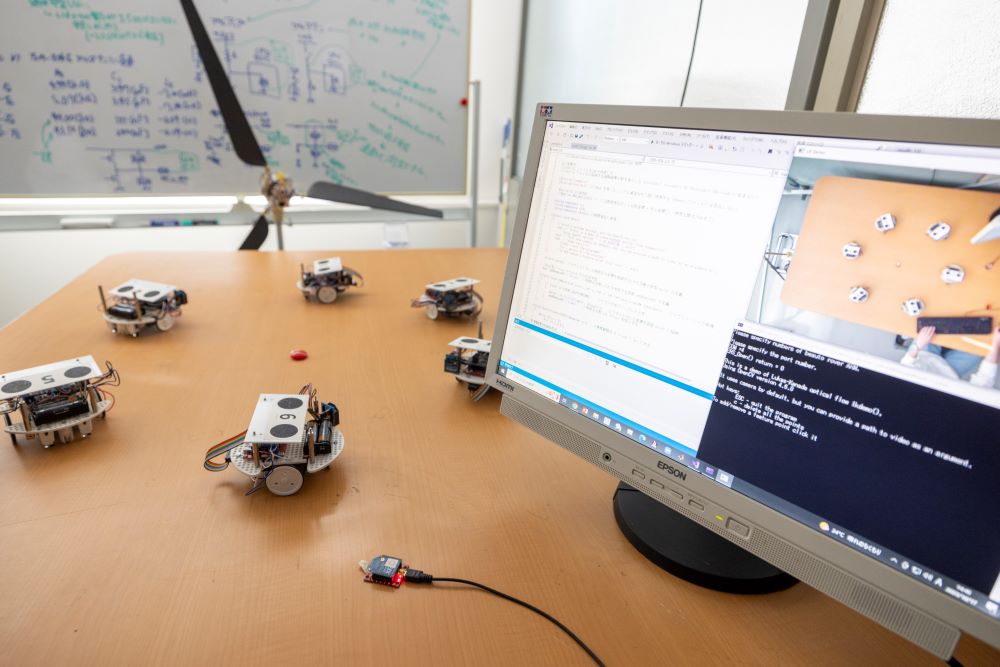
結合発振器のダイナミクスに基づいたロボット群制御
近年,ロボットの導入による無人化や自動化が様々な業界で進められています.ただし,重労働や高度な作業を単独のロボットで担う場合,そのロボットには高い性能が要求され,コストも高くつきます.そこで,安価かつ低性能な多数のロボットが「協力」して,これらの労働や作業を実施させることが期待されています.しかし,この「協力」を,従来の制御分野の知見だけでは,実現するのが難しいのです.本研究室では,この「協力」を,非線形科学分野で知られている「結合発振器のダイナミクス」によって実現できる手法について,理論だけでなく実機でも検討しています.この手法は,簡単なアルゴリズムで実現できるにもかかわらず,あるロボットが故障等によりその動作を止めても,他のロボットたちが「協力」してリカバーしてくれます.その結果,システム全体は故障に強いという大きなメリットを持つことになります.
References
- Nakamura, M. Tsukiji, N. Hara, and K. Konishi,
Stability analysis of mobile robot formations based on synchronization of coupled oscillators,
Proc. of IFAC Workshop on Distributed Estimation and Control in Networked Systems , pp. 187-191 (Tokyo, Japan, 2016) - Nakamura, K. Yoshida, K. Konishi, and N. Hara,
Robust performance of two-wheel mobile robot circular formations controlled by coupled oscillators,
Proc. of International Symposium on Nonlinear Theory and its Applications, pp. 169-172 (Shizuoka, Japan, 2016)
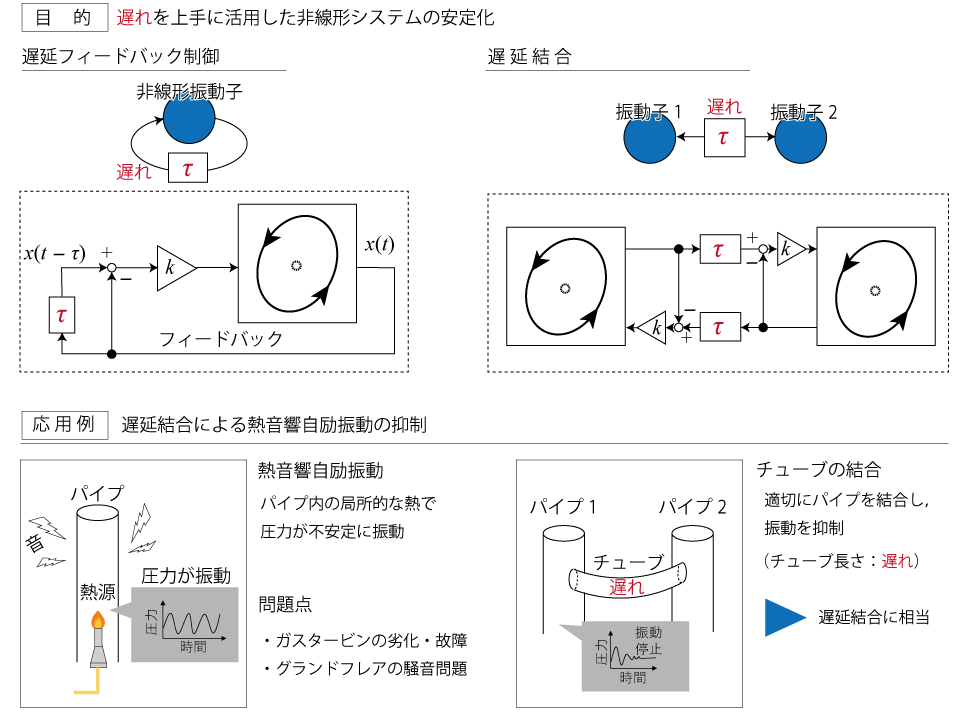
時間遅れを利用した非線形システムの制御
学校に遅刻する,バス・電車に乗り遅れるなど,「遅れ」には悪い印象があります.工学システムでも,一般的に遅れは好意的に扱われていません.実際,システムに内在する信号の遅れは,多くの場合,システムの動作を不安定化することが知られています.一方で,非線形科学分野では,信号の遅れを非線形システムの安定化に利用する制御方法(遅延フィードバック制御や遅延結合)が提案されています.本研究室では,時間遅れを利用した制御方法の理論的拡張や,実際の工学システム(例えば,直流給電バスや熱音響システム)への応用を見据えた研究をおこなっています.

References
- 小西, 杉谷
【解説論文】結合発振器に生じるAmplitude Death —ロバスト安定性からのアプローチ—,
Fundamentals Review, vol. 16, no. 2, pp. 76-82 (2022). - Y. Sugitani and K. Konishi
【解説論文】Delay-induced stabilization of coupled oscillators,
Nonlinear Theory and Its Applications, IEICE, vol. 12, no. 4, pp. 612-624 (2021). - 小西, 杉谷
【解説論文】遅延フィードバック・遅延結合による非線形システムの安定化,
計測と制御, vol. 55, no. 4, pp. 326-334 (2016). - K. Konishi, K. Yoshida, Y. Sugitani, and N. Hara,
Analysis of bifurcation and explosive amplitude death in pair of oscillators coupled via time-delay connection,
Physical Review E, vol. 111, no. 3, p. 034206 (2025) - S. Mizukami, K. Konishi, K. Yoshida, Y. Sugitani, and N. Hara,
Amplitude death in extended time-delay coupled oscillator networks,
IEEE Access, vol. 13, pp. 12666-12675 (2025) - K. Yoshida and K. Konishi,
Adaptive delayed feedback control for stabilizing unstable steady states,
Physical Review E, vol. 110, no. 1, p. 014214 (2024) - Y. Sugitani, K. Kawahara, and K. Konishi,
Robust design against frequency variation for amplitude death in delay-coupled oscillators,
Physical Review E, vol. 109, no. 6, p. 064213 (2024) - K. Konishi, K. Yoshida, Y. Sugitani, and N. Hara,
Delay-induced amplitude death in multiplex oscillator network with frequency-mismatched layers,
Physical Review E, vol. 109, no. 1, p. 014220 (2024) - Y. Sugitani and K. Konishi,
Amplitude death in delay-coupled oscillators on directed graph,
Physical Review E, vol. 105, no. 6, p. 064202 (2022) - S. Mizukami, K. Konishi, Y. Sugitani, T. Kouda, and N. Hara,
Effects of frequency mismatch on amplitude death in delay-coupled oscillators,
Physical Review E, vol. 104, no. 5, p. 054207 (2021) [PDF] - K. Yoshida, K. Konishi, and N. Hara,
Basins and bifurcations of a delayed feedback control system and its experimental verification for a DC bus circuit,
Nonlinear Dynamics, vol. 106, no. 3, p. 2363–2376 (2021) [PDF]
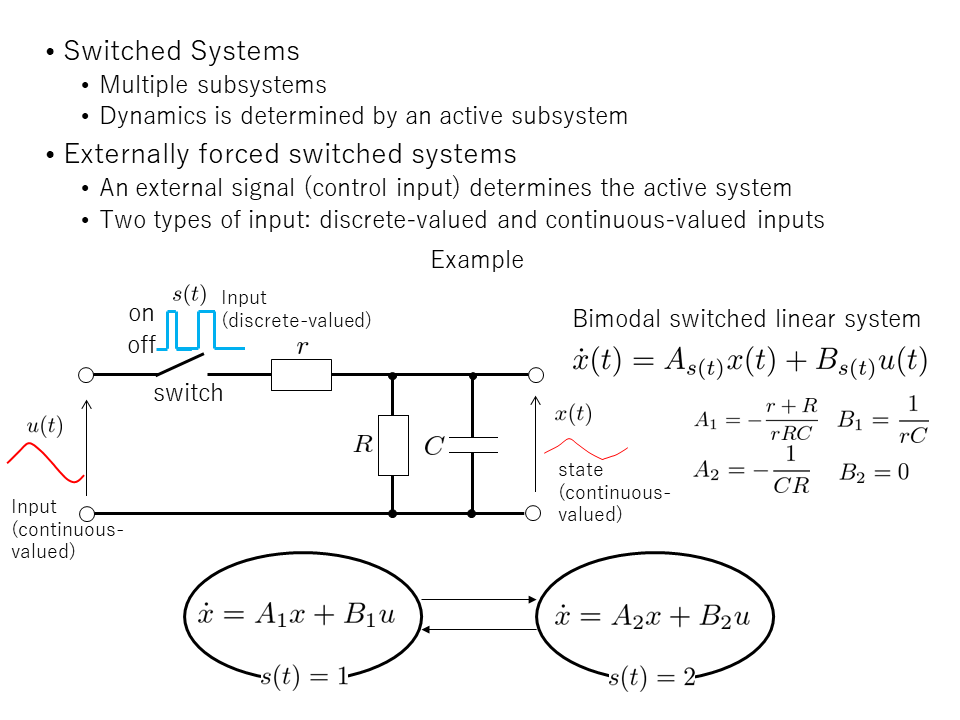
スイッチドシステム
連続事象と離散事象が混在したシステムは,ハイブリッドシステムとして知られています.例えば,電気回路では,離散値をとるスイッチング動作(On-Offの離散事象)と連続値をとる変数(電流,電圧など)が混在しています.特に,連続時間線形スイッチドシステムを対象として,スイッチング信号(離散値)が制御入力(の一部)と考えられる場合(Externally forced switching)について,制御法を開発しています.
References
- 三原大和,原尚之,小西啓治,
線形スイッチドシステムにおけるスイッチング回数削減のための安定化スイッチング則,
システム制御情報学会論文誌, vol. 34, no. 8, pp. 231-233 (2021) - N. Hara and K. Konishi,
Singular arcs in optimal control of continuous-time bimodal switched linear systems,
IEEE Transactions on Automatic Control, vol. 64, no. 2, pp. 826-833 (2019) [PDF] - N. Hara and K. Konishi,
Computation of LQ Control for Continuous-Time Bimodal Switched Linear Systems,
Proc. of 2019 American Control Conference, pp. 4955-4960 (Philadelphia, USA, 2019) - N. Hara and K. Konishi,
Singular arcs in optimal control of bimodal switched linear systems and approximate switching signals,
Proc. of 54th IEEE Conference on Decision and Control, pp. 3876-3881 (Osaka, Japan, 2015)
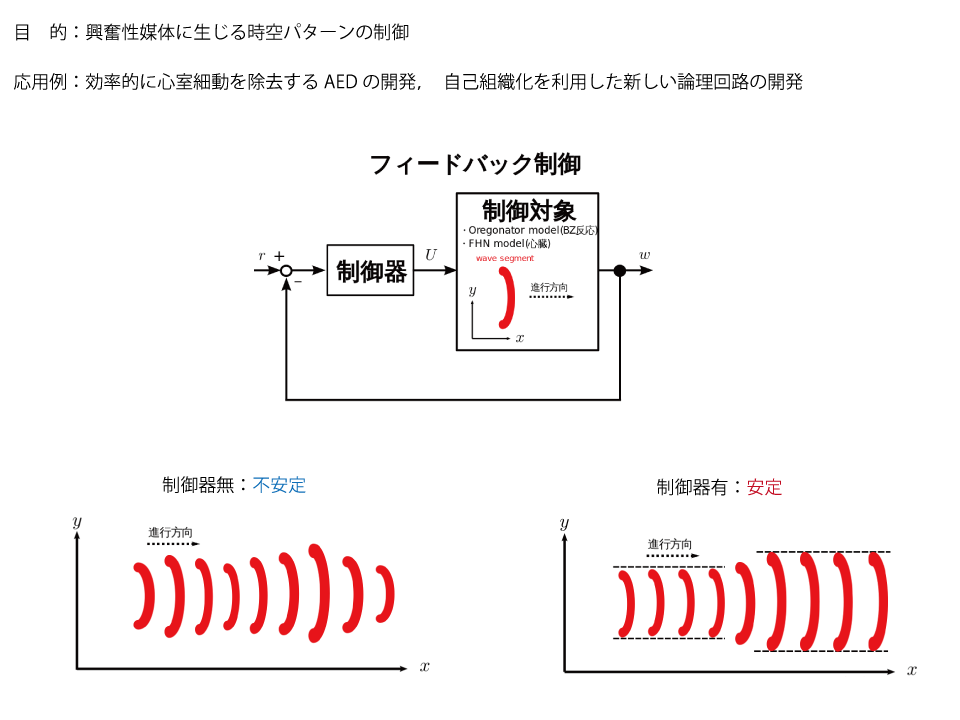
反応拡散システムのフィードバック制御
自然界には,人の手を借りることなく,規則的なパターンが形成される現象が見受けられます.これは,「自己組織化現象」と呼ばれ,例えば,動物の体表模様や化学分野のBZ反応などとして現れます.心臓で形成される不規則な電気的パターンは,心室細動や心房細動などの心疾患の原因と考えられています.また,BZ反応系に生じるパターンは,論理回路や経路探索などの情報処理への応用が期待されています.自己組織化現象の発生メカニズムは,「反応拡散システム」という数理モデルで説明することができます.本研究室では,反応拡散システムに生じる自己組織化現象をフィードバック制御によって自由自在に操る手法を開発しています.
References
- 勝俣久敏,小西啓治,原尚之,
興奮性媒体を伝搬するwave segmentsのダイナミクス推定と最適サーボシステムに基づく安定化制御,
計測自動制御学会論文集, vol. 58, no. 7, pp. 325-335 (2022) - H. Katsumata, K. Konishi, and N. Hara,
System identification of propagating wave segments in excitable media and its application to advanced control,
Physical Review E, vol. 97, no. 4, p. 042210 (2018) [PDF] - H. Katsumata, K. Konishi, and N. Hara,
Proportional-integral control of propagating wave segments in excitable media,
Physical Review E, vol. 95, no. 4, p. 042216 (2017) [PDF]
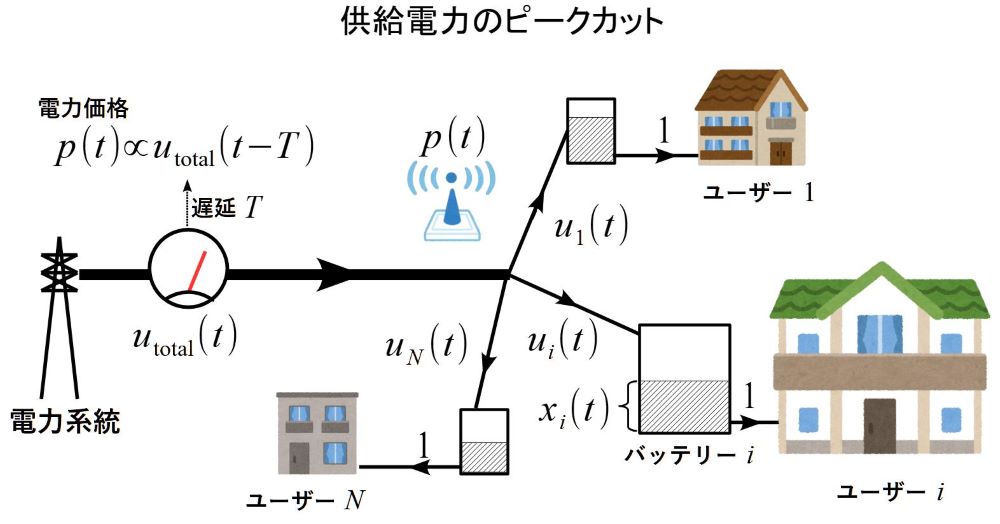
同期現象の工学的応用(企業との共同研究)
非線形科学分野において,「結合発振器のダイナミクス」は主たる研究対象であり,多くの知見が蓄積されています.しかしながら,それらを工学的に活用する試みは多くありません.本研究室では,企業との共同研究を通じて,この工学的応用に挑戦しています.具体的には,結合発振器に生じる多相同期現象を,「供給電力のピークカット(デンソー)」や「AGV配車制御(NEC)」に活用する成果を得ており,これらの特許も取得しています.基本的な考え方は,様々な分野で応用できます.
- T. Ito, K. Konishi, T. Sano, H. Wakayama, and M. Ogawa,
Synchronization of relaxation oscillators with adaptive thresholds and application to automated guided vehicles,
Physical Review E, vol. 105, no. 1, p. 014201 (2022) - T. Imasaka, A. Ito, Y. Sugitani, K. Konishi, and N. Hara,
Multi-phase synchronization for peak power reduction in energy storage oscillators coupled with delayed power price,
Nonlinear Theory and Its Applications, IEICE, vol. 13, no. 3, pp. 544-557 (2022) - T. Fukunaga, T. Imasaka, A. Ito, Y. Sugitani, K. Konishi, and N. Hara,
Dynamical behavior and peak power reduction in a pair of energy storage oscillators coupled by delayed power price,
Physical Review E, vol. 93, no. 2, pp. 022220 (2016)
[PDF] - 伊藤岳大, 若山永哉, 小西啓治, 小川雅嗣,
配車管理システム,プログラムおよび方法,
特許6991449(2021) - 伊藤章, 小西啓治, 原尚之, 杉谷栄規, 今坂友亮,
蓄電装置、及び電力供給システムの管理サーバー,
特許6523184(2019) - 伊藤章, 小西啓治, 原尚之, 杉谷栄規, 福永智洋,
蓄電装置,
特許5991228(2016)