起立支援装置 Sit-to-Stand Assistance Device
「補う」のではなく、「ともに動く」
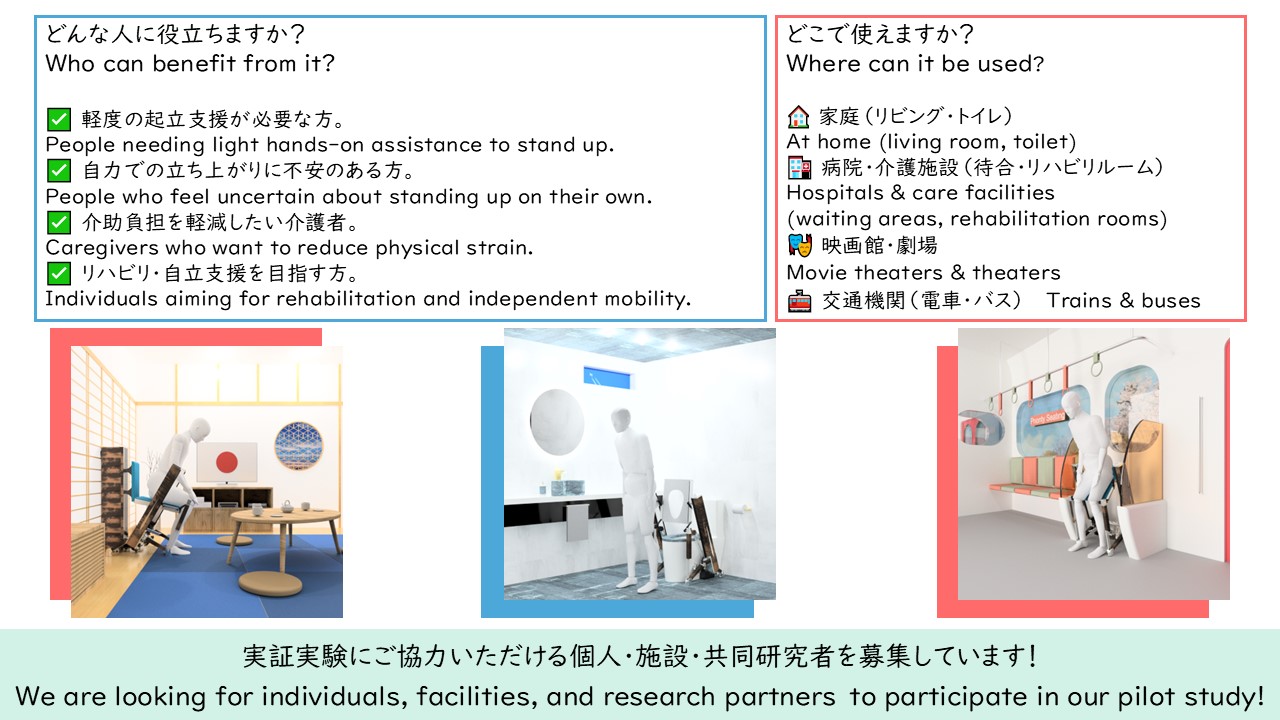
自然な起立動作を再現可能な非装着型支援ロボット
Not Just Support—But Moving Together
A Non-Wearable Robot That Reproduces Natural Standing-Up Motion
「いつまでも自力で立ち上がりたい」──
その気持ちを支えるには、すべてを代わってしまうロボットではなく、
“足りない力だけをそっと支える存在”が必要だと私たちは考えました。
装着型の機器やベルトで固定する方法では、使用者の頑張りと
ロボットの補助とのちょうどよいバランスを保ちにくいと感じたのです。
そこで、私たちは「一緒に立ち上がるロボット」という発想にたどり着きました。
使う人が主役のまま、自然な動きの中で支える。
それがこの装置のコンセプトです。
"I want to keep standing up on my own—always."
To support that desire, we believe a robot should not take over the entire motion,
but gently assist only where strength is lacking.
Conventional wearable devices or belt-fixed systems can often disrupt the delicate balance
between a user's own effort and robotic assistance.
That’s why we envisioned a robot that stands up together with the user—
a device that supports while keeping the person as the main actor.
This is the core concept behind our assistive robot.
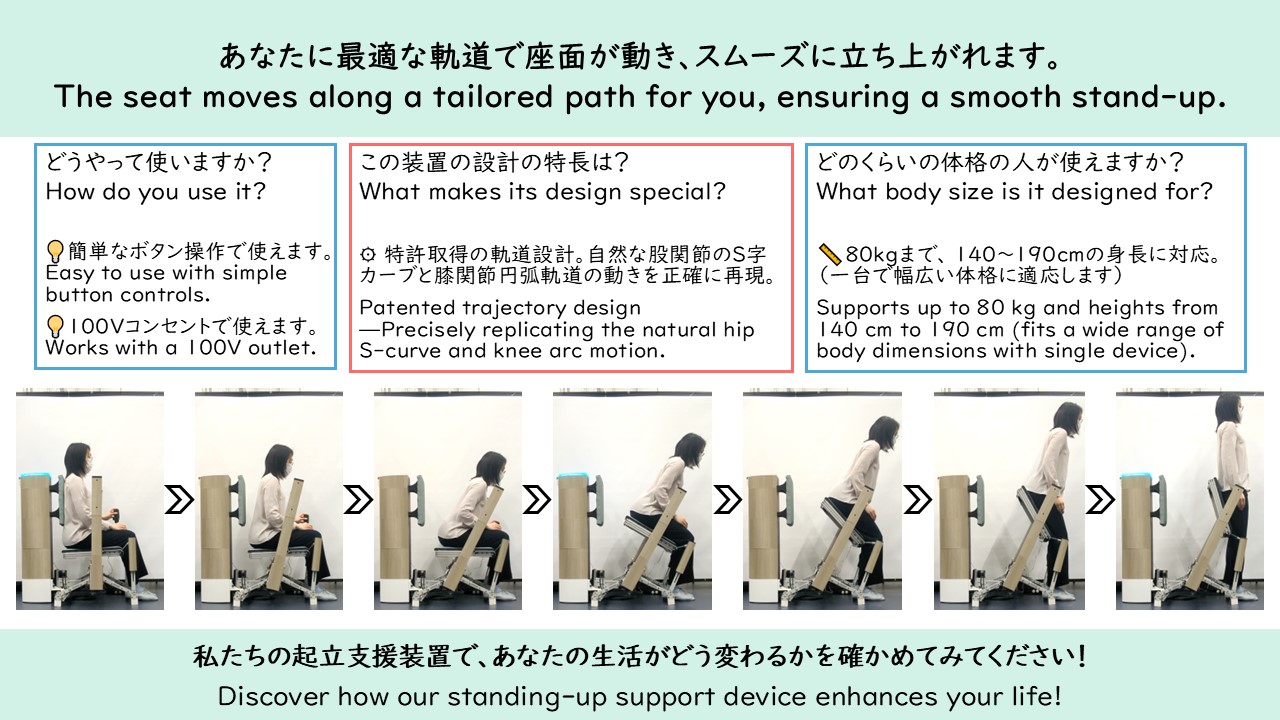
● 設計の特徴/Design Highlights
-
-
個別の使用者の実測データから自然な起立軌道を作成/Natural standing-up trajectories were constructed based on real data from individual subjects."
-
4リンク構造により、自然な起立時に見られるS字・円弧軌道を再現/Robot employs a four-link mechanism that replicates the characteristic S-shaped trajectory of the hip and arc-shaped trajectory of the knee observed in natural standing-up movements.
-
● 主な仕様/Key Specifications
-
-
対象者:身長140~190cm、体重80kgまで/Target users: Height 140–190 cm, Weight up to 80 kg
- ステッピングモータによる速度制御/Motion is controlled via a stepping motor with feedforward speed control
-
● 本研究に関する最新論文/Related Research Publication
-
- プレプリント/Preprint: https://doi.org/10.48550/arXiv.2505.12525
Title: Development of a non-wearable support robot capable of reproducing natural standing-up movements
Authors: Atsuya Kusui, Susumu Hirai, Asuka Takai