活動報告
2025年7月10日
水上ドローンを用いた自律型点検システムの開発
2025年7月7日、当研究室の川合忠雄特任教授が大阪港湾局と連携して大阪府泉大津市の助松2号物揚場の桟橋下部にて現在開発中の水上ドローンの試運転を行いました。
今年度は桟橋式岸壁を対象とし、開発中の水上ドローンを用いて岸壁下面部を計測するとともに、空中ドローンで撮影した画像データと統合して3次元モデルを作成し、損傷箇所の特定と損傷の程度の評価を行って、複雑構造物を効率的に維持管理する手法を研究開発しています。
引き続き、評価の属人化をなくし、検査漏れを防ぐとともに、損傷の経年変化を認識して、より安全で効率的な桟橋のメンテナンス手法を開発していく予定です。
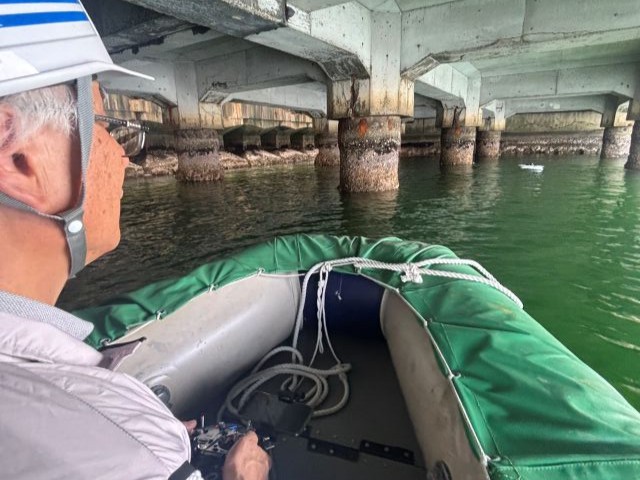
水上ドローンの試運転を行っている様子です。


実験をした桟橋の外観はこちらです。

桟橋の下にボートで入り、水上ドローンの動作実験を行っています。

水上ドローン搭載カメラで撮影した桟橋下面部の画像です。
