Research
Research
Array Antenna
An array antenna can control its pattern by adjusting the amplitude and phase of multiple antenna elements.
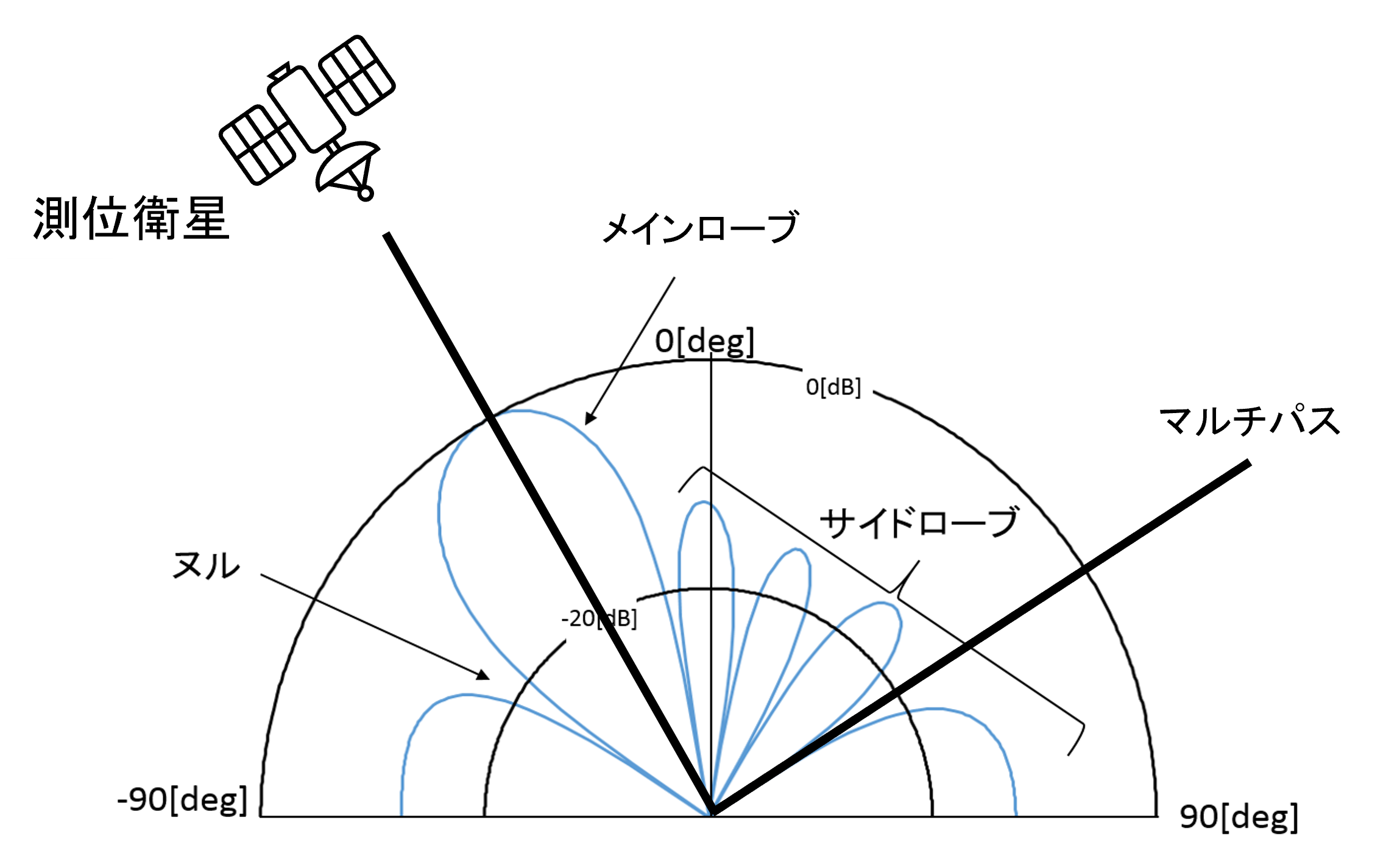
Fig1 Directivity Pattern of an Array Antenna
GNSS/INS Integrated Navigation
Satellite navigation (GNSS) is widely used as a system that enables easy and convenient positioning anytime, anywhere. However, due to the weakness of its radio waves, there is always concern about the vulnerability of the system in environments with multiple propagation (multipath), ionospheric anomalies, radio interference, etc.
Therefore, we will conduct research and development of robust navigation technology that is combined with an inertial navigation system (INS) that does not rely on radio waves, and that has a satellite selection/elimination function using an array antenna with multiple elements.
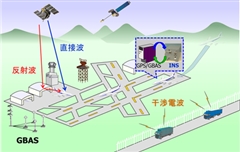
Fig2 Radio Environment on Airport Surfaces and GNSS/INS for Reliable Navigation
PPP
Precise Point Positioning (PPP) is a GNSS-based positioning method. It is a positioning technology that uses precise satellite orbit and clock error information to achieve centimeter-level positioning accuracy using only a single receiver. Since PPP does not require a ground reference station, it is expected to be used in many fields because of its ability to provide highly accurate positioning regardless of location.
Therefore, this laboratory is working on centimeter-class positioning of aircraft using PPP technology.
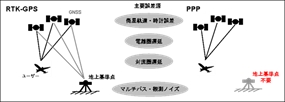
Fig1 Comparison of PPP and RTK-GPS
GNSS Signal Classification and Integrated Navigation Using Machine Learning
In recent years, there has been a growing demand for highly accurate and stable self-localization technologies to support the societal implementation of next-generation mobility solutions such as autonomous vehicles, drones, and AAM (Advanced Air Mobility). While GNSS (Global Navigation Satellite System) is an indispensable foundational technology for navigation support in mobility, it faces the challenge of significantly reduced positioning accuracy in environments such as urban areas where high-rise buildings are densely clustered, due to the reception of signals reflected off surfaces such as building walls (NLOS signals). Our laboratory is working on the development of a GNSS/IMU hybrid navigation system that achieves high-precision and stable positioning using inexpensive, compact devices, even in poor reception environments such as urban areas. In this study, we propose a method that integrates “NLOS detection technology,” which uses dual-circularly polarized antennas to identify reflected waves via machine learning (Random Forest) based on signal polarization characteristics, with “Factor Graph Optimization (FGO),” which estimates the entire state simultaneously while retaining past observation data. In particular, the core technique of this research is the introduction of a “Switching Noise Model,” which dynamically assigns a maximum variance (penalty) to detected NLOS signals during the optimization calculation of Tightly-Coupled FGO, effectively nullifying them in the positioning calculation.
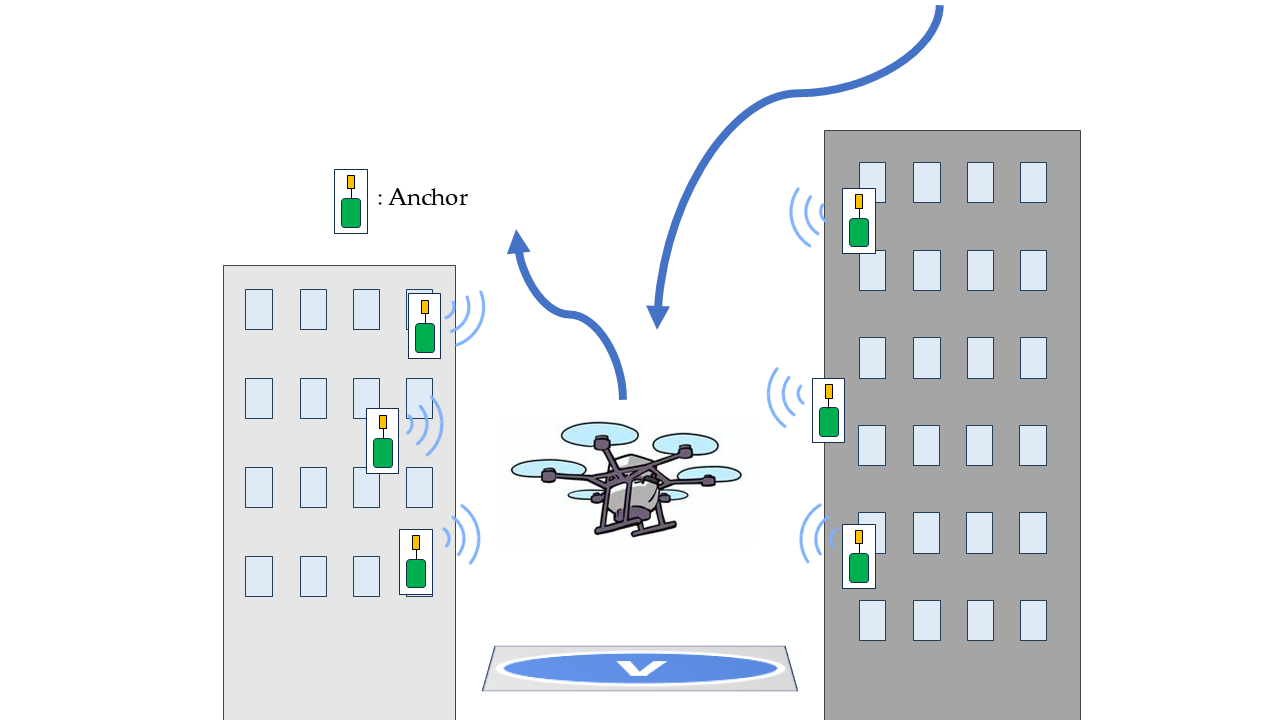
UWB Positioning Technology
Positioning technology that accurately determines a drone’s or eVTOL’s (electric vertical takeoff and landing aircraft) location is essential for safe autonomous flight. While GNSS (Global Navigation Satellite Systems), the current mainstream technology, is extremely convenient, it faces the challenge of significantly reduced accuracy in densely built-up urban areas, indoor environments, or when subjected to interference such as jamming. In this research, we are focusing on UWB (Ultra-Wideband), which enables high-precision ranging at the centimeter level and is less susceptible to noise and obstacles. We aim to develop a next-generation navigation system that can maintain robust self-localization even in environments where GNSS signals are unavailable by utilizing UWB.
Rather than relying on a single sensor, we are advancing our research using a “multi-source navigation (sensor fusion)” approach that integrates information from multiple sensors using advanced algorithms.
- Development and Evaluation of UWB Ranging Systems: We have integrated state-of-the-art UWB modules and are conducting detailed analyses of ranging error characteristics and communication reliability in dynamic environments. We conducted experiments by deploying UWB fixed stations (anchors) in urban areas and equipping drones with mobile stations (tags).
- Implementation of Advanced Sensor Fusion: We integrate high-precision position data obtained from UWB with vehicle motion data derived from inertial navigation systems (INS) and other sources. By implementing an Extended Kalman Filter (EKF), we are developing a system capable of deriving extremely stable positioning solutions even in the face of temporary communication outages or sudden noise.
By seamlessly integrating local high-precision positioning using UWB with global positioning via GNSS, we contribute to the realization of “non-stopping, non-getting-lost” mobility in any environment. We aim to become a highly reliable infrastructure technology that fundamentally supports the societal implementation of flying cars and autonomous drones.
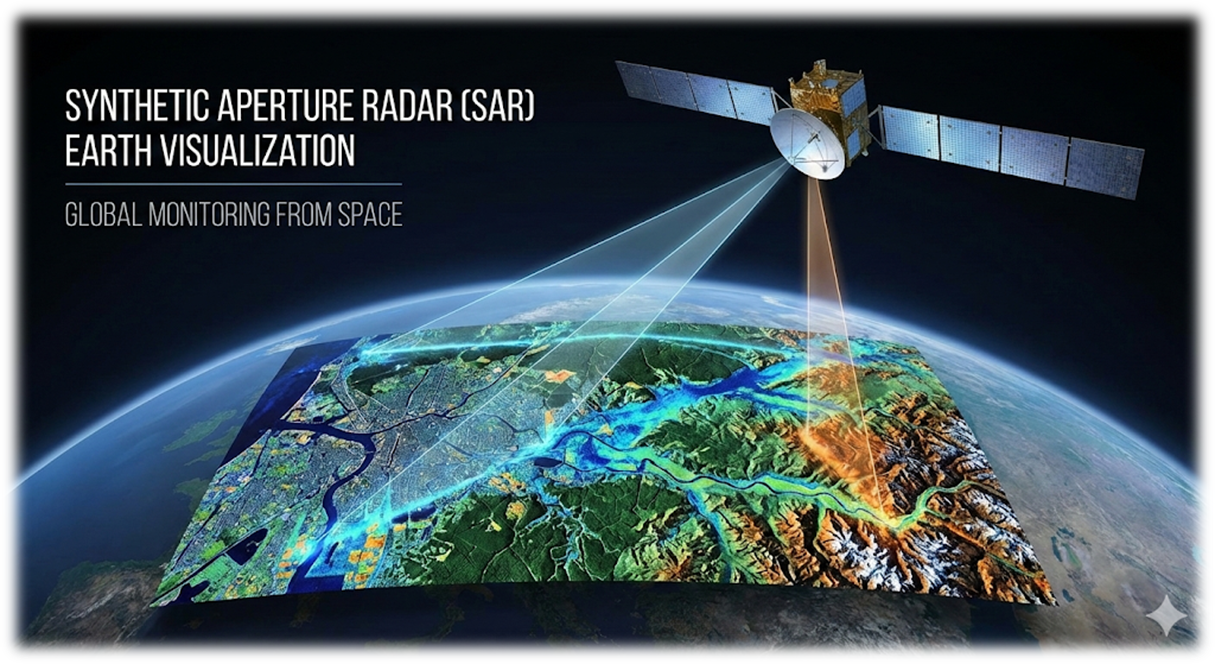
Remote Sensing Technology Using Synthetic Aperture Radar (SAR)
In recent years, remote sensing technology has garnered significant attention as a means of addressing growing security and geopolitical risks, countering the deterioration of social infrastructure, and responding to disaster prevention and environmental conservation challenges associated with climate change. Remote sensing technology involves observing signals from satellites or aircraft to investigate and analyze conditions on the Earth’s surface without physical contact.
In this laboratory, we are conducting research on GNSS-SAR, which visualizes ground-surface targets using images that two-dimensionally reconstruct the differences in complex scattering intensities of objects distributed across the observation area. Synthetic Aperture Radar (SAR) is a technology that creates a virtual, giant antenna by synthesizing signals while aligning their phases through signal processing, thereby enhancing spatial resolution; it is the core method of this research.
Research on GNSS Reflected Waves
In recent years, remote sensing technology to observe a wide area of the earth from space has been attracting attention as a solution to social issues such as the lack of skilled workers and the aging of society faced by agriculture and forestry, as well as the frequent occurrence of natural disasters due to global warming.
In this study, we focused on estimating soil moisture content using the GNSS reflectometry, which receives and analyzes GNSS signals reflected from the ground and water surfaces to estimate the amount of moisture contained in the reflected points. By utilizing this technology, we are working on research to automate and improve the efficiency of managing the growing environment of agricultural crops and predicting landslides.
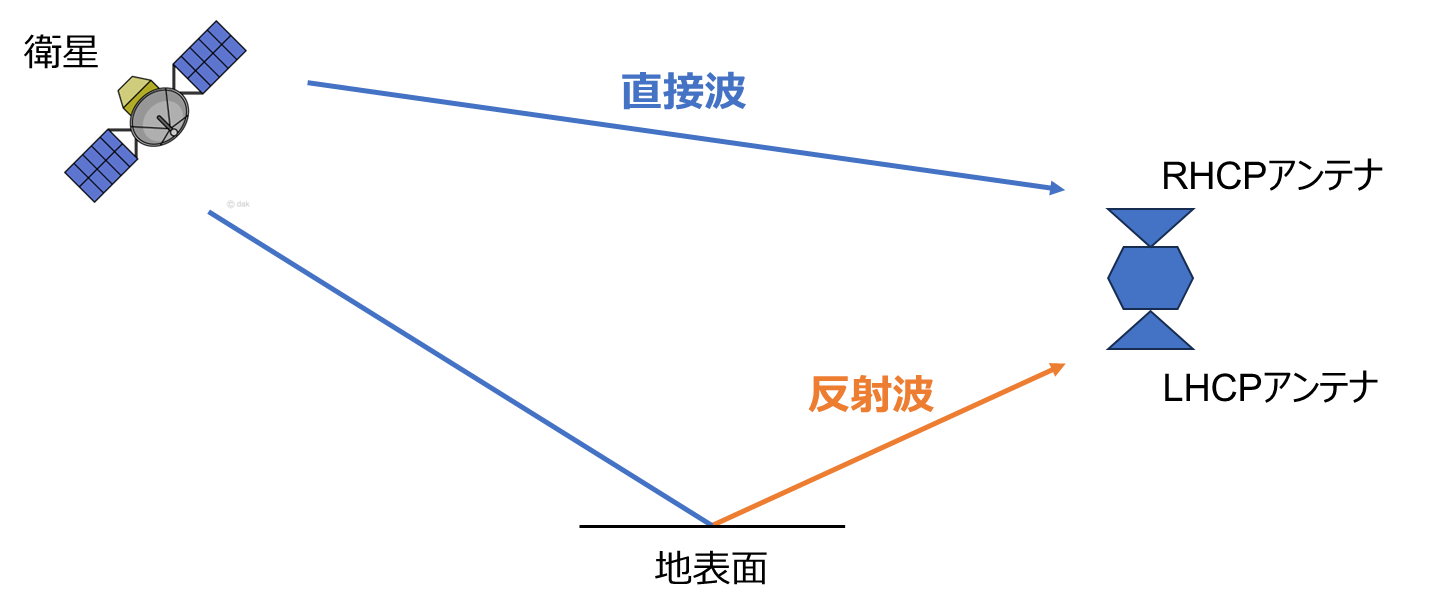
Fig4 GNSS signal reception image
Publications and Presentations
- R. Katsurada, Study on Spoofing Detection Method Using Doppler Frequency, Navigation and Timing of Japan, National Convention, 2025.12.3-5, Tokyo, Japan (2025) (学生優秀研究発表賞受賞)
- Y. Takeuchi and T. Tsujii, Research on multi-copter attitude estimation and reliability improvement in multi-antenna GPS, The 62th Aircraft Symposium, 2024.10.15-17, Hukui
- N. Yasugi and T. Tsujii, Detection and estimation of GNSS spoofing attacks against mobile objects, The 62th Aircraft Symposium, 2024.10.15-17, Hukui
- A. Kitamura, Estimation of Earth Surface Characteristics by GNSS Reflectometry Using a Dual-Polarization
Antenna and Investigation of Improvement Methods, Navigation and Timing of Japan, National Convention, 2024.5.22-24, Tokyo, Japan (2024) (学生最優秀研究発表賞受賞) - A. Sema, The Institute of Positioning, Navigation and Timing of Japan, GPS/GNSS Symposium2023, 2023.10.25-27, Tokyo, Japan(2023) (ポスターセッション最優秀ポスター発表賞受賞)
- N. Yasugi, The Institute of Positioning, Navigation and Timing of Japan, GPS/GNSS Symposium2023, 2023.10.25-27, Tokyo, Japan(2023) (ポスターセッション優秀ポスター発表賞受賞)
- K. Ikeno, H. Tanimura, A. Kitamura, A.Osaka and T.Tsujii, The Institute of Positioning, Navigation and Timing of Japan, GPS/GNSS Symposium2023, 2023.10.25-27, Tokyo, Japan(2023) (高精度測位チャレンジ3位入賞)
- D. Kawahara and T. Tsujii, The Institute of Positioning, Navigation and Timing of Japan, GPS/GNSS Symposium2023, 2023.10.25-27, Tokyo, Japan(2023) (SDRコンテスト2位受賞)
- M. Yoneyama and T. Tsujii, A Study on GNSS Multipath Arrival Direction Estimation and Error Reduction Using Antenna Array, The Institute of Positioning, Navigation and Timing of Japan, National Convention, 2023.5.17-19, Tokyo, Japan(2023) (学生最優秀研究発表賞受賞)
- H. Shiotani and T. Tsujii, The research on GNSS spoofing detection using IMU, The 60th Aircraft Symposium, 2022.10.11-13, Niigata, Japan(2022) (学生優秀講演賞受賞)
- J. Shibata and T. Tsujii, K. Goto, S. Ohsawa,DOA Estimation of GNSS Signals for Spoofing Detection Based on the MUSIC Algorithm, Aerospace Technology Japan Vol.70, No.5, October 2022, 137-145.
- M. Yoneyama and T. Tsujii, A Study on GNSS Multipath Arrival Direction Estimation and Error Reduction Using Antenna Array, The Institute of Positioning, Navigation and Timing of Japan, National Convention, 2022.6.8-10, Online (学生最優秀研究発表賞受賞)
- M. Awai and T. Tsujii, T. Fujiwara, S. Ohsawa,GNSS Adaptive Beamforming Including Null-steeringfor UnwantedSignal, Aerospace Technology Japan Vol.69, No.3, 2021, 122-127.
- S. Tanaka and T. Tsujii,Development of a Model to Detect GNSS Reflected Signals Using Machine Learning and Application to Positioning , Aerospace Technology Japan Vol.69, No.6, 2021, 229-235.
- Y. Kawabata and T. Tsujii, Development of Reflected-Signal Detection Methods to Improve GNSS Kinematic Positioning Accuracy Under Urban Environments, The 59th Aircraft Symposium, 2021.11.30-12.2, Online(2021) (学生優秀講演賞受賞)
- Y. Akizuki, 都市部におけるTightly-coupled方式を用いた GNSS/INS複合航法の測位精度の評価, GPS/GNSS Symposium 2021, Beginers' Session, 2021.10.27-29, Online(2021) (研究奨励賞受賞)
- H. Shiotani and T. Tsujii, Research on Improving the Accuracy of Indoor Positioning Using Smartphones, GPS/GNSS Symposium 2021, Beginers' Session, 2021.10.27-29, Online(2021) (研究奨励賞受賞)
- J. Shibata, A Study on Signal Arrival Direction Estimation Using Array Antenna for Anti-Spoofing, The Institute of Positioning, Navigation and Timing of Japan, National Convention, 2021.6.23-25, Online (学生最優秀研究発表賞受賞)
- T. Mori and T. Tsujii, Effect of Enroute Time Management on Flight Trajectories in the Terminal Area, Transactions of the Japan Society for Aeronautical and Space Scinences, Aerospace Technology Japan Vol.19, No.6, November 2021, 813-820.
- T. Tsujii, K. Yonebayashi, T. Fujiwara and S. Ohsawa, GNSS Array Antenna for Mitigating Multipath Errors in Urban Environment, International Symposium on GNSS 2018, Bali, Indonesia, Nobember 21-23, 2018.
- K. Yonebayashi, K. Fujiwara, S. Osawa and T. Tsujii, CRPA技術による衛星航法のマルチパス誤差低減、The 56th Aircraft Symposium, 2018.11.14-16, Yamagata, Japan(2018)
- K. Yonebayashi, K. Fujiwara, S. Osawa and T. Tsujii, Hardware bias calibration for CRPA by using carrier phase measurement, GPS/GNSS Symposium 2018, 10.30-11.1, Tokyo, Japan(2018) (学生最優秀研究発表賞受賞)
- K. Yonebayashi, K. Fujiwara, S. Osawa and T. Tsujii, GNSSアレーアンテナのハードウェアバイアス較正に関する研究, The Institute of Positioning, Navigation and Timing of Japan, National Convention, 2018.5.16-18, Tokyo, Japan(2018)
- H. Ninomiya, T. Tsujii, T. Fujiwara and Y. Shimizu, Precise point positioning for aircraft using QZSS augmentation signal, International Symposium on GNSS 2017, 10-13 December, 2017, Hong Kong, China
- M. Ninomiya, T. Tsujii, K. Fujiwara and Y. Shimizu, 準天頂衛星の補強信号を利用した航空機の精密単独測位に関する研究, The 55th Aircraft Symposium, 2017.11.20-22, Shimane, Japan(2017)
- K. Yonebayashi, GNSSマルチパス誤差軽減のためのアレーアンテナに関する実験的研究, The 55th Aircraft Symposium, 2017.11.20-22, Shimane, Japan(2017)
- M. Ninomiya, T. Tsujii, K. Fujiwara and Y. Shimizu, QZSS補強信号を利用した精密単独測位法による航空機の位置推定, GPS/GNSS Symposium 2017, 2017.11.7-9, Tokyo, Japan(2017)
- K. Yonebayashi, T. Tsujii, K. Fujiwara and Y. Shimizu, ソフトウェア受信機によるGNSSアレーアンテナの指向性操作に関する研究, GPS/GNSS Symposium 2017, 2017.11.7-9, Tokyo, Japan(2017) (最優秀学生発表賞(ポスター部門))