研究紹介
屋外自律移動ロボットに関する研究
人間が生活する空間と同じ領域で活動するロボットが実現されるには、人間の生活空間を理解し安全に走行する技術が必要になります。本研究課題では、屋外の公共空間で移動ロボットが周囲の状況を理解し、目的位置までの走行を確実に行うための技術に関する研究を行っています。

中央公会堂周辺での公開実験(中之島ロボットチャレンジに参加)
ロボットアームを利用したサービスロボットに関する研究
将来の人口減少に対応するためにロボットによる様々な自動化が望まれています。本研究課題では、車輪型の移動ロボットの上にロボットアームを搭載した移動ロボットを用いて人間が行っている作業を代替する技術に関する研究を行っています。コンビニエンスストアの商品の陳列・廃棄作業のスピードと正確さを競うフューチャーコンビニエンスストアコンテストに参加し、様々な大学との技術交流も行っています。

産業用ロボットの自動化に関する研究
工場のロボットは人間が事前に設定する手順をなるべく少なくすることが求められています。本研究課題では、ロボットの手先に取り付けたカメラなどのセンサにより、作業台上の対象物の位置・姿勢を自動的に認識する技術と認識結果に基づきロボットが行うべき作業を自動的に計画・実行するための技術について研究を行っています。
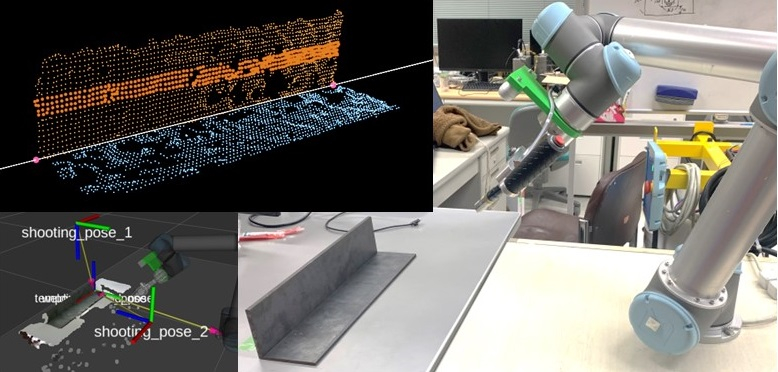
2枚の鉄の板の交線を検出して溶接動作を自動生成する様子