Research
Click here for English version
研究テーマ
アレーアンテナ
複数のアンテナ素子を用い,その振幅と位相を調整することでアンテナパターンを制御可能なアンテナ
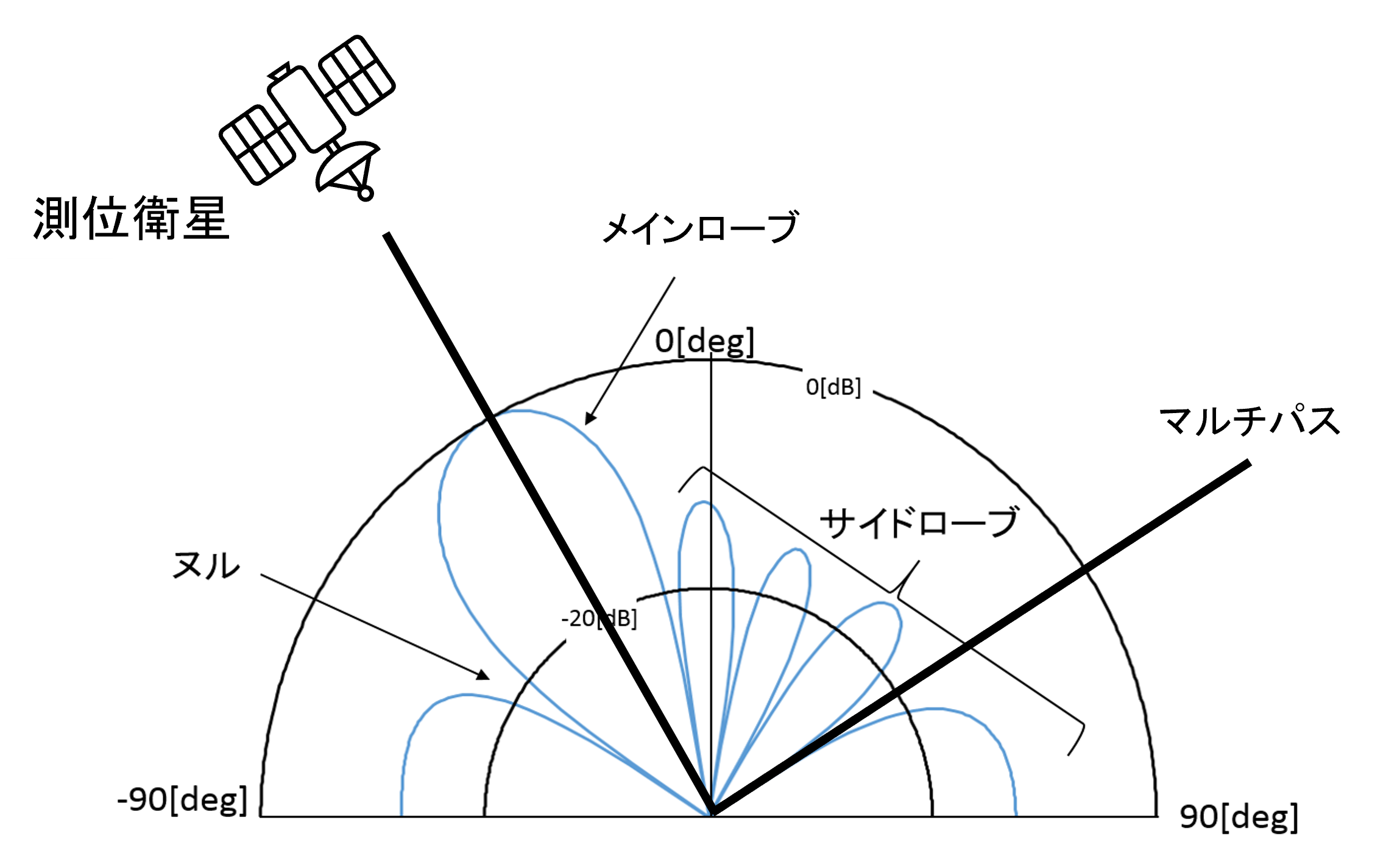
図1 アレーアンテナの指向性パターン
GNSS/INS複合航法
衛星航法(GNSS)は、何時でも何処でも簡便に測位が可能なシステムとして広く利用されているが、その電波の微弱さのため、多重伝搬(マルチパス)、電離圏異常、電波干渉等の環境におけるシステムの脆弱性が常に懸念されている。そこで、電波に依らない慣性航法装置(INS)と複合すると共に、複数の素子を持つアレーアンテナによって衛星の選択/排除機能を備えたロバストな航法技術の研究開発を行う。
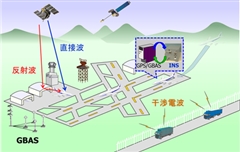
図2 空港面の電波環境とGNSS/INSによる高信頼化航法
LEO衛星を用いたドップラー測位
耐ジャミング・スプーフィング
PPP
精密単独測位(PPP : Precise Point Positioning)とはGNSSを利用した測位方式の一つである。精密な衛星の軌道・時計誤差情報を用いることにより、単独受信機のみでセンチメートル級の測位精度を可能にする測位技術である。地上基準局が不要なため場所に依らず高精度な測位を行える点から、多くの分野でPPPの利用が期待されている。そこで、本研究室ではPPP技術による航空機のセンチメートル級測位に取り組んでいる。
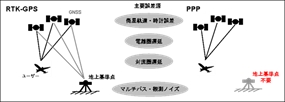
図2 PPPとRTK-GPSの比較
機械学習を用いたGNSS信号分類と複合航法
近年、自動運転やドローン、さらにはAAM(Advanced Air Mobility)といった次世代モビリティの社会実装に向け、高精度かつ安定した自己位置推定技術が強く求められている。モビリティの航法支援においてGNSS(全球測位衛星システム)は欠かせない基盤技術であるが、都市部のように高層建築物が林立する環境では、壁面等で反射した信号(NLOS信号)を受信してしまうことによって測位精度が著しく悪化するという課題を抱えている。本研究室では、都市部などの劣悪な受信環境においても、廉価で小型の機器を用いて高精度かつ安定した測位を実現するGNSS/IMU複合航法システムの開発に取り組んでいる。本研究では、両円偏波アンテナを用いて信号の偏波特性から機械学習(ランダムフォレスト)により反射波を識別する「NLOS検知技術」と、過去の観測情報を保持しつつ全状態を一括で推定する「ファクターグラフ最適化(FGO)」を統合した手法を提案している。特に、Tightly-Coupled FGOの最適化計算において、検知されたNLOS信号に対して動的に極大な分散(ペナルティ)を与え、測位計算から実質的に無効化する「Switching Noise Model」の導入が、本研究の核となる手法である。
UWBを用いた測位技術
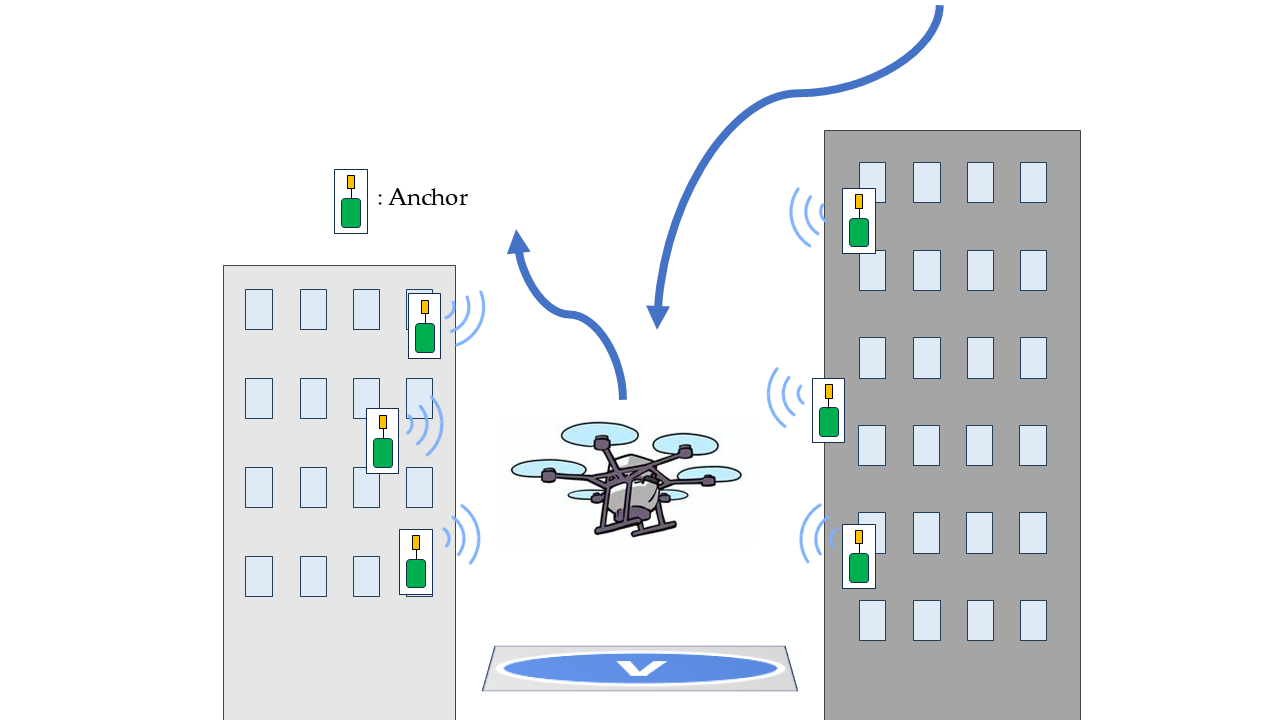
ドローンやeVTOL(電動垂直離着陸機)の安全な自律飛行には、自身の位置を正確に把握する測位技術が不可欠である。現在主流であるGNSS(衛星測位システム)は非常に便利だが、建物が密集する都市部や屋内環境、あるいは妨害波(ジャミング)などの影響下では精度が著しく劣化するという課題を抱えている。 本研究では、数センチメートルレベルの高精度な測距が可能で、ノイズや障害物の影響を受けにくいUWB(Ultra-Wideband:超広帯域無線)に着目している。GNSSの信号が届かない環境下でも、UWBを活用することでロバスト(堅牢)な自己位置推定を維持できる次世代の航法システムの構築を目指す。
単一のセンサーに依存するのではなく、複数のセンサー情報を高度なアルゴリズムで統合する「複合航法(センサーフュージョン)」のアプローチで研究を進めている。
-
UWB測距システムの構築と評価: 最先端のUWBモジュールを実際に組み込み、動的な環境下における測距の誤差特性や通信の信頼性を詳細に解析している。市街地にUWB固定局(アンカー)を配置し,ドローンに移動局(タグ)を搭載して実験を行った。
-
高度なセンサーフュージョンの実装: UWBから得られる高精度な位置情報と、慣性航法装置(INS)などから得られる機体の挙動データを統合する。拡張カルマンフィルタ(EKF)を実装し、一時的な通信途絶や突発的なノイズに対しても、極めて安定した測位解を導き出すシステムを開発している。
UWBを用いたローカルな高精度測位と、GNSSによるグローバルな測位をシームレスに連携させることで、あらゆる環境下で「止まらない・迷わない」モビリティの実現に貢献する。空飛ぶクルマや自律飛行ドローンの社会実装を根底から支える、信頼性の高いインフラ技術となることを目指す。
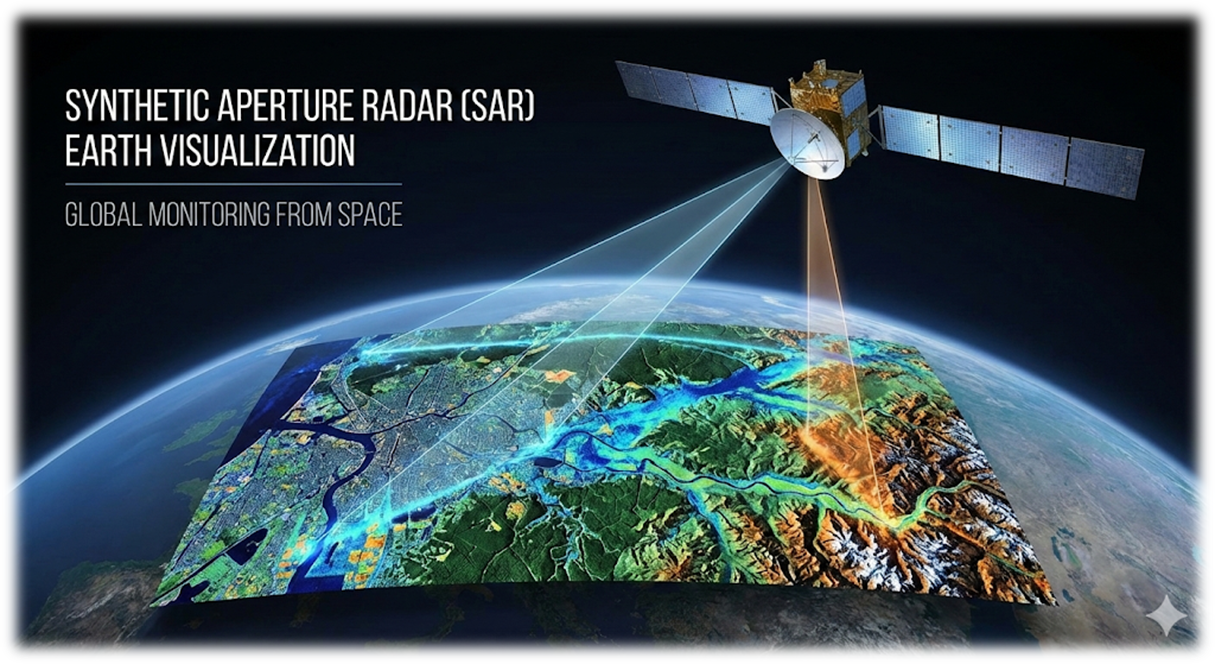
合成開口レーダ(SAR)を用いたリモートセンシング技術
近年、安全保障・地政学的リスクの増大、社会インフラの老朽化対策、さらには気候変動に伴う防災・環境保全への対応として、リモートセンシング技術が注目を集めている。リモートセンシング技術とは、衛星や航空機からの信号を観測し、地表に触れることなく状態を調査・分析する技術である。本研究室では、観測域に分布する物体の複素散乱強度の違いを2次元的に復元した画像により、地表面ターゲットを可視化するGNSS-SARの研究に取り組んでいる。合成開口レーダ(SAR)とは、受信信号処理によって位相を揃えながら信号を合成することで、仮想的な巨大アンテナを作り出し、空間分解能を高める技術であり、本研究の核となる手法である。
GNSS-Rに関する研究
近年、農業や林業が直面する担い手不足や高齢化問題、また地球温暖化による自然災害の頻発などの社会課題に対する解決策として、宇宙空間から地球の広範囲を観測するリモートセンシング技術が注目されている。
本研究では、高い可用性と簡易性を重視し、GNSS-Rを用いた土壌水分量推定に着目した。GNSS-Rでは、地表面や水面から反射したGNSS信号を受信し、解析することで反射点に含まれる水分量を推定する。この技術を活用することにより、農作物の生育環境の管理や土砂災害の予測を自動化、高効率化する研究に取り組んでいる。
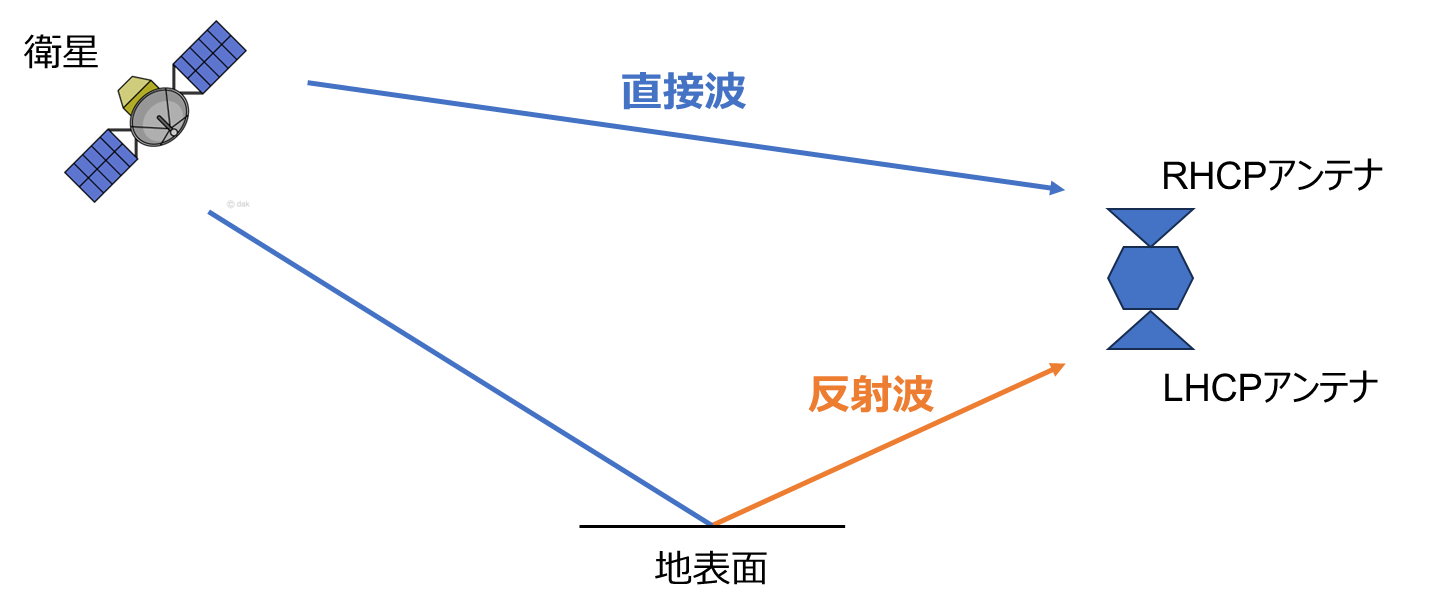
図4 GNSS信号の受信イメージ
研究論文および発表
- 桂田吏輝: ドップラー周波数を利用したGNSSスプーフィング検知手法の検討, 測位航法学会 GPS/GNSSシンポジウム2025, 2025年12月3-5日, 東京海洋大学越中島会館セミナー室 (学生優秀研究発表賞受賞)
- 竹内優斗,辻井利昭:マルチアンテナGPSにおけるマルチコプター姿勢推定と信頼性向上に関する研究,第62回飛行機シンポジウム, 2024年10月15-17日、福井 (2024) (学生優秀講演賞受賞)
- 八杉尚樹,辻井利昭:移動体に対するGNSSスプーフィング攻撃の検知と除去,第62回飛行機シンポジウム、2024年10月15-17日, 福井 (2024) (学生優秀講演賞受賞)
- 北村章人:両円偏波アンテナを用いたGNSS反射法による地表面特性推定と改善手法の検討,測位航法学会 全国大会,2024年5月22日-24日,東京海洋大学越中島会館セミナー室 (学生最優秀研究発表賞受賞)
- 瀬間晶穂:測位航法学会 GPS/GNSSシンポジウム2023、2023年10月25-27日、 東京海洋大学 越中島会館 (ポスターセッション最優秀ポスター発表賞受賞)
- 八杉尚樹:測位航法学会 GPS/GNSSシンポジウム2023、2023年10月25-27日、 東京海洋大学 越中島会館 (ポスターセッション優秀ポスター発表賞受賞)
- 池野航太、谷村晴生、北村章人、逢坂惇志、辻井利昭:測位航法学会 GPS/GNSSシンポジウム2023、2023年10月25-27日、 東京海洋大学 越中島会館 (高精度測位チャレンジ3位入賞)
- 川原大毅、辻井利昭:測位航法学会 GPS/GNSSシンポジウム2023、2023年10月25-27日、 東京海洋大学 越中島会館 (SDRコンテスト2位受賞)
- 米山まうむ、辻井利昭:アレーアンテナによるGNSSマルチパスの方向推定及び誤差低減に関する研究、測位航法学会 全国大会、2023年5月17-19日、東京海洋大学越中島会館セミナー室 (学生最優秀研究発表賞受賞)
- 塩谷秀登、辻井利昭:IMU及びNMEAメッセージを用いたスプーフィング検知に関する研究、第60回飛行機シンポジウム、2022年10月11-13日、新潟 (2022) (学生優秀講演賞受賞)
- J. Shibata, T. Tsujii, K. Goto, S. Ohsawa,DOA Estimation of GNSS Signals for Spoofing Detection Based on the MUSIC Algorithm, Aerospace Technology Japan Vol.70, No.5, October 2022, 137-145.
- 米山まうむ、辻井利昭:アレーアンテナによるGNSSマルチパスの方向推定及び誤差低減に関する研究 、測位航法学会 全国大会、2022年6月8-10日、オンライン (学生最優秀研究発表賞受賞)
- M. Awai, T. Tsujii, T. Fujiwara, S. Ohsawa,GNSS Adaptive Beamforming Including Null-steeringfor UnwantedSignal, Aerospace Technology Japan Vol.69, No.3, 2021, 122-127.
- S. Tanaka, T. Tsujii,Development of a Model to Detect GNSS Reflected Signals Using Machine Learning and Application to Positioning , Aerospace Technology Japan Vol.69, No.6, 2021, 229-235.
- 川端夢子、 辻井利昭:反射波におけるドップラ周波数の検証および機械学習を利用したGNSS信号反射波検知モデルへの適用、第59回飛行機シンポジウム、2021年11月30日-12月2日、オンライン(2021) (学生優秀講演賞受賞)
- 秋月勇樹:都市部におけるTightly-coupled方式を用いた GNSS/INS複合航法の測位精度の評価、GPS/GNSSシンポジウム2021 ビギナーズセッション、2021年10月27-29日、オンライン (研究奨励賞受賞)
- 塩谷秀登、辻井利昭:スマートフォンを用いた室内測位の精度向上に関する研究、GPS/GNSSシンポジウム2021 ビギナーズセッション、2021年10月27-29日、オンライン (研究奨励賞受賞)
- 芝田淳之介:耐スプーフィングに向けたアレーアンテナによる信号到来方向推定に関する研究、測位航法学会 全国大会、2021年6月23-25日、オンライン (学生最優秀研究発表賞受賞)
- T. Mori and T. Tsujii, Effect of Enroute Time Management on Flight Trajectories in the Terminal Area, Transactions of the Japan Society for Aeronautical and Space Scinences, Aerospace Technology Japan Vol.19, No.6, November 2021, 813-820.
- T. Tsujii, K. Yonebayashi, T. Fujiwara and S. Ohsawa, GNSS Array Antenna for Mitigating Multipath Errors in Urban Environment, International Symposium on GNSS 2018, Bali, Indonesia, Nobember 21-23, 2018.
- 米林健太、藤原健、大澤壮志、辻井利昭:CRPA技術による衛星航法のマルチパス誤差低減、第56回飛行機シンポジウム、2018年11月14日-16日、山形(2018)
- 米林健太、藤原健、大澤壮志、辻井利昭:CRPAにおける搬送波位相を移用したハードウェアバイアスの較正、GPS/GNSSシンポジウム2018、10月30日-11月1日、東京(2018) (学生最優秀研究発表賞受賞)
- 米林健太、藤原健、辻井利昭:GNSSアレーアンテナのハードウェアバイアス較正に関する研究、測位航法学会 全国大会、2018年5月16-18日、東京(2018)
- H. Ninomiya, T. Tsujii, T. Fujiwara and Y. Shimizu: Precise point positioning for aircraft using QZSS augmentation signal, International Symposium on GNSS 2017, 10-13 December, 2017, Hong Kong, China
- 二宮光莉, 辻井利昭, 藤原健, 清水悠介: 準天頂衛星の補強信号を利用した航空機の精密単独測位に関する研究, 第55回飛行機シンポジウム, 2017/11/20-22, 島根県民会館
- 米林健太: GNSSマルチパス誤差軽減のためのアレーアンテナに関する実験的研究, 第55回飛行機シンポジウム, 2017/11/20-22, 島根県民会館
- 二宮光莉, 辻井利昭, 藤原健, 清水悠介: QZSS補強信号を利用した精密単独測位法による航空機の位置推定, 第22回GPS/GNSSシンポジウム2017, 2017/11/7-9, 東京海洋大学越中島会館
- 米林健太, 辻井利昭, 藤原健, 清水悠介:ソフトウェア受信機によるGNSSアレーアンテナの指向性操作に関する研究, 第22回GPS/GNSSシンポジウム2017, 2017/11/7-9, 東京海洋大学越中島会館 (最優秀学生発表賞(ポスター部門))