画像処理と3次元計測で、
ロボット手術を支援。

内視鏡を使ったロボット手術は、患者さんへの負荷は少ない反面、手術部位を確認しにくいといった課題も。内視鏡が撮影したデータを3次元化し、手術を支援するシステムを構築中の吉本講師にお話を伺いました。
心臓手術を支援するシステムを、医学部と共同研究。
本学医学部の心臓血管外科からお話をいただき共同研究をスタートしました。僧帽弁膜閉鎖不全症の患者さんには、「弁形成術」といって人工弁輪と呼ばれるリングを埋め込む手術を行います。その際にリングのサイズ選定のために病変部を計測する必要があります。
従来型の開胸手術では、傷口が大きいので直接メジャーで計測できましたが、ロボット手術の場合は傷口が小さく、サイズ計測が難しくなります。そこで、ロボット手術で用いる内視鏡画像上にリングを表示することでサイズ選定を支援するシステムを開発することになりました。

内視鏡画像にAR表示することでサイズ選定。
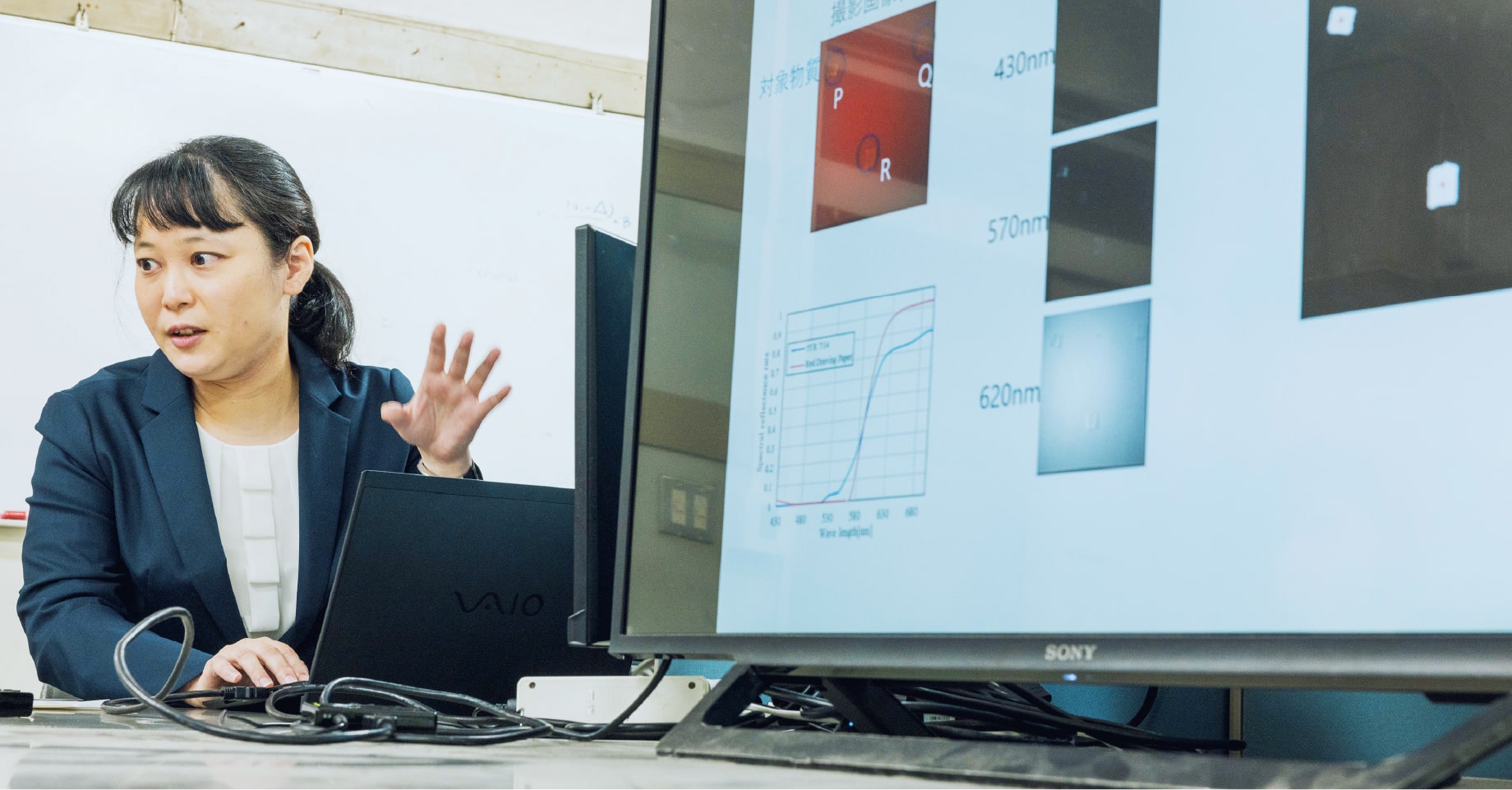
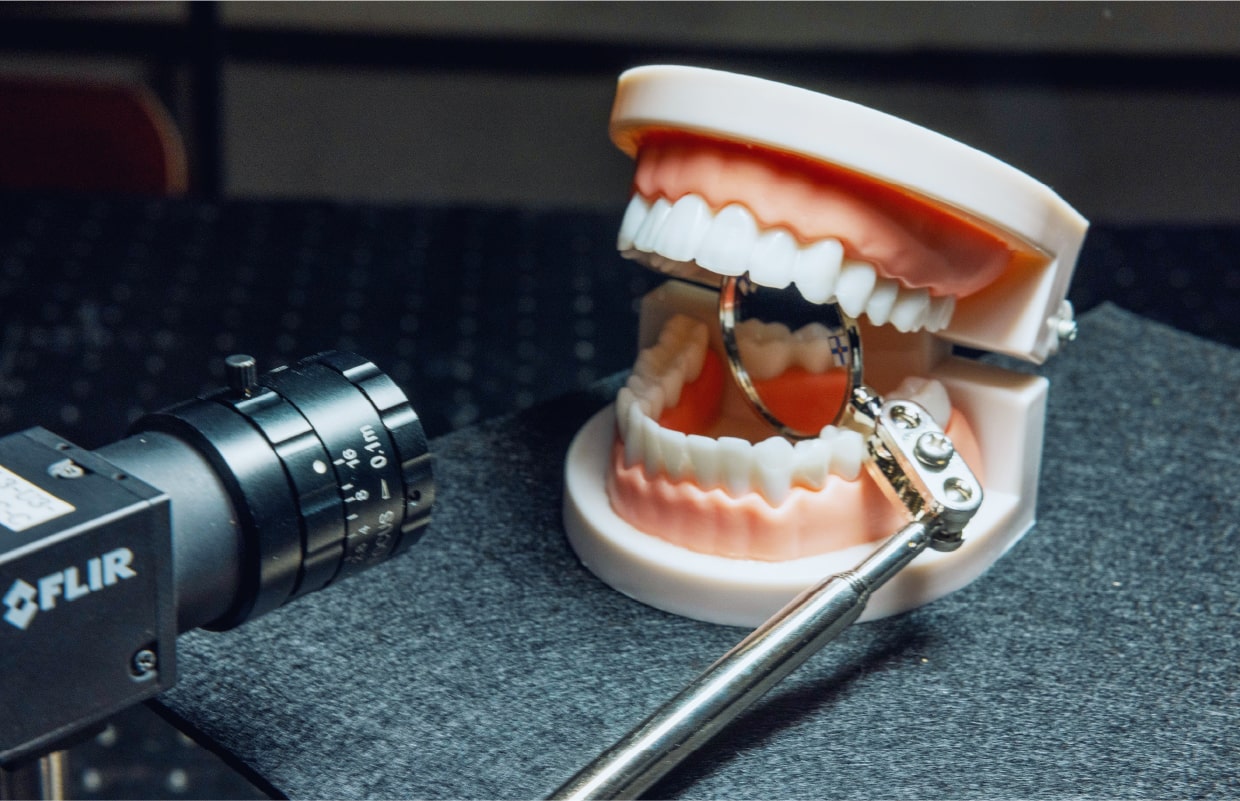
手術ロボットのステレオ内視鏡のデータ像から3次元的な距離情報を読み取り、立体的に取り出せるようにします。これにより、リングを置きたい箇所にマーキングすれば、マーカ間の距離を3次元計測できます。画像処理を用いてマーカ位置を抽出し、リングの画像を重ね合わせることで、リアルにリングを乗せるようにサイズ選定ができるのです。
現在は二眼のステレオ内視鏡のデータを使っていますが、単眼の内視鏡手術に対応できるシステムを開発し、これまで手がけた胃腸や心臓だけでなく、より幅広い現場での活用をめざしています。
患者さんの体への負担軽減、入院期間の短縮、医療費削減に加え、AR/VR機能を付け加えることで、医師や医学生のバーチャル手術トレーニングシステムとして役立てられればと考えています。
工学技術者として、医療に貢献できる。
機械系出身ですが、博士後期課程では看護工学に興味を持ち、医療分野への応用研究に打ち込みはじめました。研究室には同じように工学の技術を医療に役立てたい気持ちの学生が多いです。医療・プログラミング・数学と多岐に渡る知識とスキルが必要となりますが、それらを補うために研究室で画像処理のプログラミングや人体に関する勉強会を開催しています。
医師なしでは医療は成り立ちませんが、最新医療は工学技術に支えられています。工学技術者として医療に貢献したいと考えている人は、当研究室できっと大きな手応えを感じてもらえると思います。