
介護のサポートだけでなく機能回復を狙う運動学習支援ロボット
介護ロボットというと、介護者をサポートするパワーアシストロボットや、介護される人を運んで移動を助けるロボットなどを思い浮かべるのではないでしょうか。こうした一般的な介護ロボットは「介護を楽にする」ことを目的としているのに対し、高井先生が開発を進める運動学習支援ロボットはまったく別の視点に立つものです。
「これまでの介護ロボットは、ハンモックのような布を用いて吊り上げて、介護が必要な人の移動をサポートするリフト型のものが大半でした。これは、介護される人の身体機能の回復が目的ではなく、生活を直接的に支援することが目的で、どちらかというと介護者をサポートするものですから、介護される人にはあまり主体性はありません。一方、私が作りたい運動学習支援ロボットとは、介護される人ができることを伸ばしていく、いわばリハビリテーションロボットです。介護される人に主体性を持ってもらい、運動学習支援ロボットを使うことで身体機能を回復させ、最終的にはロボットが必要なくなる状態を目指します」
私たちの脳には、新しい運動を習得していく「運動学習」の仕組みがあります。それをロボットで活性化させ、学習を促すのが運動学習支援ロボットの目的です。ロボットというと、自動化や省力化で人間に楽をさせてくれるものだと思いがちですが、高井先生の運動学習支援ロボットはその先入観をくつがえします。
「脳卒中が原因でこれまでできていた動きができなくなってしまったり、加齢で痛くなった膝をかばう動きが癖になってしまったり。そうした人に、良い動きを再学習してもらう。ロボットでこうした運動の支援を行おうという考え方は、一般の方が思い描くような全自動で動きを代行してくれる機械とは異なるのではないでしょうか。運動学習支援ロボットは、むしろ楽をさせないロボットです。たとえばリハビリの現場では、患者さんに動きの要点を体得して貰うために、セラピストが反復訓練を行います。やり方を忘れてしまった動作を繰り返し行ってもらうもので、患者さんによっては厳しいと感じられることもあるかもしれません。運動学習支援ロボットは、良い動きを指導してくれるセラピストのような役割を担うロボットなのです」
リハビリの分野では、インストラクションやセラピーの多くが施術者の経験や感覚に基づいて行われているため、高井先生はそれをロボットが扱えるように数値化・理論化し、少子高齢化が進む中でロボットが肩代わりできる部分には、ロボットを導入していきたいと考えています。
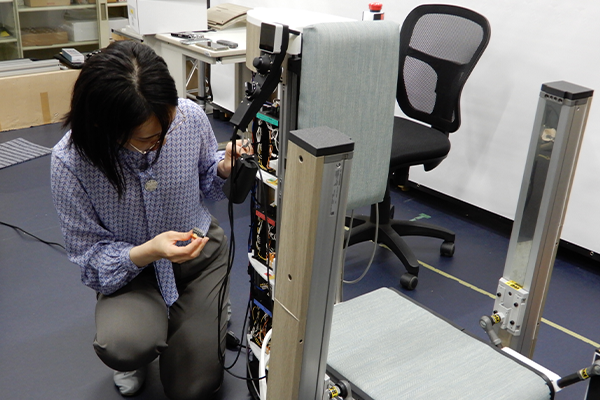
こうした理念のもと、高井先生がいま取り組んでいるのが、座面をゆっくり起こして立ち上がる動作を支援する、椅子型の「起立支援ロボット」。立ち上がる動作は足に体重を超える負荷がかかるため、筋力の低下などにより、立ち上がりが困難になる高齢者は少なくありません。そこで、座面を起こしていくことで自然と立ち上がる動作が再びできるようになる起立支援装置を開発しています。支援されながらでも再び立ち上がれるようになれば、動きの要点を体得して貰うための反復ができるようになります。

椅子型の「起立支援ロボット」
開発に向けてアシストの力加減や運動に関わる視覚情報を調査
高井先生は、運動学習支援ロボットの開発には、まだいくつか解決しなければならない課題があるとして、まず「力覚インタラクションが測定しにくい」ことが課題だと言います。一般人にはなじみのない「力覚インタラクション」とはどういう意味なのでしょうか。
「介護者が、介護が必要な人の動きをアシストするときには、支えたり支えられたりといった力のやり取りが生じます。それを力覚インタラクションと呼んでいるのですが、そうした力の向きや押したり引いたりする力加減というのは、介護者の手と患者さんの体のあいだにセンサーを入れるわけにもいかないので、測定が容易ではありません」
そこで今は、起立支援ロボットの座面にセンサーを取り付けて、ロボットの一定の動きに対して人がどのように反応するのかというデータを収集しているのだそう。これまでのところ、座面に対して垂直方向にかかる力については、ロボットの動きと人の反応との関係性が徐々に明らかになってきたといいます。
もう一つの課題は、介助・介護を必要とする人の動作を改善するためには、その人にどのような情報を伝えるべきかということです。この課題を解くためには、どのような情報が人の動きをより良くするのか、まずは人の頭の中に備わっている運動を実行するためのメカニズムについて知る必要があると高井先生は言います。
「人の脳には、何らかの情報が入ってくるとそれに対応した運動をするように指令を出す、いわばコンピュータのプログラムのような仕組みがあります。その仕組みを明らかにしたい。そこで、脳にいろいろな条件で情報を与えてみて、実行される運動がどう変わるのかを調べています」

高井先生はまず視覚情報に着目。視覚情報が遅れて与えられた場合、運動にどのような影響が出るのかについて、VR(仮想現実)技術を利用した実験を行いました。実験ではVRゴーグルを装着した被験者に、ボールを投げる動作をしてもらいます。その動作に対して仮想空間で自分が投げたボールが前に飛んでいくタイミングを、0秒(誤差なし)、0.2秒、0.4秒…と段階的に遅らせていって、動作への影響を調べます。その結果、0.2秒程度の遅れでは動作に影響は見られないものの、0.4秒や0.6秒の遅れでは違和感が生じてうまく投げられなくなりました。
「実験から、視覚情報のタイミングの遅れが一定の範囲にあると動作に悪影響を及ぼすことがわかりました。さらに研究を進めて、視覚情報を運動の学習にうまく利用したいと考えています」
アレンジ次第でさまざまな使い方ができるロボットを目指す
高井先生が開発を進めている起立支援装置は、2025年日本国際博覧会 大阪・関西万博の『未来社会ショーケース事業』「フューチャーライフ万博・フューチャーライフエクスペリエンス」でも展示されました。
「万博で起立支援装置を体験してくれた方々からは、『自然と立ち上がれた』『楽に立ち上がれた』といったポジティブな意見をいただいた一方で、やはり多くの来場者には『ロボットは楽をさせてくれるもの』『力を入れなくても立ち上がらせてくれる』といった先入観があって、運動学習の支援についてはなかなか理解されないという課題も見えてきました」
また、高井先生の起立支援装置は、高齢者や脳卒中による麻痺の患者、脊髄損傷の患者などさまざまな症例の使用者を想定していますが、それがかえって医療従事者の利用を消極的にしているといいます。
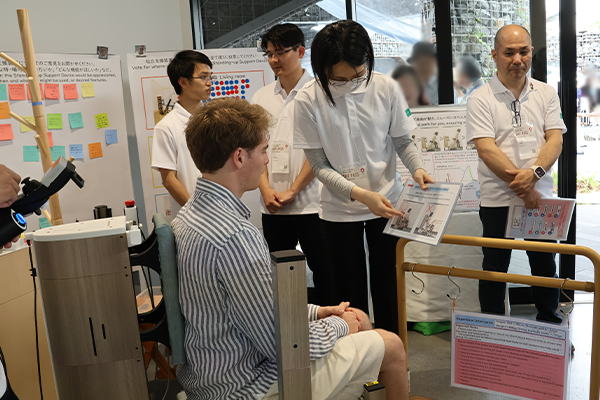
大阪・関西万博での展示の様子
「医療従事者の方は、その機器が何の症例に対応するものかというところを意識されているのだと思います。したがって、私の起立支援装置のように『誰でも使えます』というと、あまり興味を示されません。しかし、起立支援装置は一つの症例に特化されていないからこそ、アレンジによっていろいろな用途に使える柔軟性が特徴です。それを医療従事者の方にも理解してもらえるように、症例ごとの使い方を実践して提案していきたいと考えています」
リハビリや介護の現場での使用を想定した運動学習支援ロボットを開発する高井先生ですが、大学にいるからこそ、技術開発だけでなく開発の指針となる理論の構築も大切にしています。たとえば、脳卒中で失われた機能を回復できる期間は、発症から6カ月くらいしかなく、人によっては3カ月程度の場合もあるといいます。
「限られた期間で最大限回復できるように、リハビリの“最適解”を導き出すための理論を作っていきたい。現場から離れた大学にいるからこそ、個別的な対応ではなく積み重ねたデータから理論的な指針を示せるのではないかと思っています」
リハビリとは畑違いの工学の目線を大切にしたいという高井先生。とはいえ、もちろん医療従事者との意見交換を繰り返し行って、開発に取り入れています。
「とりあえず形がなければ現実的な議論がしにくいので、まずはロボットを1台作って医師や理学療法士・作業療法士に大学へ来てもらい、意見を聞きました。使いやすいサイズや安全性、操作性など多くの建設的な意見を得ることができ、それらをもとに改良したのが、今回万博に展示した起立支援装置です。万博でも『手すりがあったほうがいい』などの意見がありましたから、今後もそういった声を取り入れて、より使いやすいロボットの開発に取り組んでいきます」
最後に、これから介護に関わる可能性がある、もしくはすでに関わっている30代、40代の方々に向けてメッセージをいただきました。
「30代、40代の人はまだまだ力もありますので、時間をかけてロボットを利用するくらいなら、自分で動いたほうが早いと思われるかもしれませんが、必要な場面に使えそうなロボットをぜひ探してみてほしいと思います。そういったロボットの中には、まだまだ開発中のものもありますので、開発に参加するような気持ちで、もし機会があれば積極的に意見を出していってください。開発者はつねに利用者の意見を募集しています」
プロフィール

工学研究科 機械系専攻 助教
工学研究科 機械系専攻 助教
博士(工学)。株式会社国際電気通信基礎技術研究所脳情報研究所ブレインロボットインタフェース研究室専任研究員を経て、同客員研究員(継続中)。大阪市立大学大学院工学研究科・工学部機械物理系専攻・機械工学科助教を経て、現職。人の運動の理解および運動学習支援ロボット、リハビリテーションシステムの研究に取り組んでいる。
※所属は掲載当時



