SSSRCだより
2026年4月19日
SSSRCだより2026年4月号
姿勢系の活動について
こんにちは,SSSRCの姿勢系担当の佃です.本稿では姿勢系のOMUSAT-3における役割と次号機に向けた開発状況について,ご報告したいと思います.
OMUSAT-3において姿勢系が担当しているのは,GNSSによる位置及び時刻の取得,そして軌道寿命の算出です.初めに,GNSSの開発状況についてソフト/ハード/運用の3つの観点からお伝えいたします.GNSSのソフト開発ですが,基本的な部分は完了して.現在,後述します運用方法の変更により,取得データから軌道を算出し必要なパラメタのみを出力する仕様の実現に向けて改修を行っています.前述の仕様を実現するためにSony提供のArduino用ライブラリを利用できず,さらに低レイヤーのNuttxを直接操作する必要があるということが一つのハードルですが,着実に前に進めているところです.ハード開発ですが,今回はケーブル長の自由度の高さやアンテナの種類の豊富さから,[アナログパッチアンテナ+GNDプレーン+同軸コネクタ/ケーブル]という構成を採用しています.先日の試験において,実際に要求精度を満たしながら機能するということが確認されました.ただ,運用上障りのない問題ではありますが,アンテナおよびソフトの仕様が対応している一部の衛星の信号が取得できないという問題が発生しています.こちらに関して,余裕があれば原因を探れればと思います.また今後は,ドップラーシフト補正機能の確認も予定されています.運用に関しましては,地上局との通信が完全に成立していない場合であっても衛星の位置を把握できるよう,データの取り扱いを変更しています.最後に軌道寿命の算出にあたっては,手計算による概算の後,MathWorks®様提供のSimulinkを用いてシミュレーションを作り,詳細な解析を行いました.この知見は運用の策定や衛星の設計などに反映されています.
次に,次号機に向けた開発についてご報告させていただきます.姿勢系では現在,次号機で最大1度の誤差精度をもつ3軸姿勢制御器の開発にむけて,要素開発を行っています.太陽センサに関しては2種類の候補があるうち,片方は実用化に向けた開発段階,片方はBBM段階となっており,最大1度の誤差精度を達成するにはどちらに関しても一層の精度向上を目指す必要があります.磁気センサに関しては基本的な試験は終わっており統合を残すのみとなっています.IMUは基本的なデータ取得が完了しており,制振台など設備を整えた上でより詳細かつ正確にデータを取ることとなっています.GNSSに関してはOMUSAT-3の設計及び知見を引き継ぐこととなっています.アクチュエータである磁気トルカおよびソフトに関しては,前者に関しては一定の蓄積があるものの仕様の再検討などもあり,まもなく本格的な開発が開始される運びとなっています.
最後に,日頃の開発において的確なアドバイスや指導,貴重な資料を提供していただている吉田先生および金田先生に深く感謝の意を示すとともに,PDR等でお世話になっている諸先生方ならびにOMU基金等を通じて多大なるご支援をいただいています皆様方に,この場を借りて心より御礼申し上げます.
機械工学科 B3 佃和寿
OMUSAT-Ⅲ,進捗報告会について
みなさま,日頃からSSSRCの活動を応援していただきありがとうございます.OMUSAT-3プロジェクトマネージャーの坂本一眞(B4)です.
馴染みの先輩方も卒業され,桜の咲く季節となりました.今回は2月28日に実施しましたOMUSTA-3の進捗報告会についてご報告したいと思います.
今回の進捗会はPDR(2025年夏に実施)で分かった新たな制約に対応するための仕様変更を報告する目的の下,開催いたしました.PDR当日はOBの方々や学内外の先生方,関係者の皆さまにオンライン/現地で参加いただくことができました.
2025年夏のPDRからの大きな変更点は以下の2点です.
1.太陽電池による再充電を行わず,バッテリーの初期容量のみによる運用を行うこと.
2.ミッション部の膜は展開するのではなく,開いた状態で固定して省スペースにすること.
以上の変更点による各系のコンポーネントの仕様といった内容に加え,現在進めている内閣府調整の状況やMBSE(Model-Based Systems Engineering)に関する取り組みの進捗についてもご報告させていただきました.
参加いただいた方々からの指摘はミッション部搭載の機器の動作条件に始まり,運用計画や捕捉までの時間,開発体制についてと多岐の内容にわたりました.これらの指摘を踏まえて,これからのOMUSAT-3の開発を進めていきたいと思います.
最後になりましたが,ご参加いただいた方々に厚く御礼を申し上げます.今後とも応援の程,よろしくお願いいたします.
電子物理工学科 4年 坂本一眞
ハイブリッドロケット3号機「暁」,電装系の成果について
こんにちは,COLOURSプロジェクトで電装系長を務めております坂本匠です.本稿では,2026年3月末に打ち上げを実施したハイブリッドロケット3号機「暁」における電装系の役割と成果,ならびに次号機に向けた開発状況についてご報告いたします.
本機体における電装系の主なミッションは,第一に飛翔データの確実な保存です.前号機においては,電池残量の低下に起因するマイコンのリセットにより,取得データの一部が消失するという課題が顕在化しました.これを踏まえ,「暁」ではハードウェアおよびソフトウェアの両面から対策を講じました.具体的には,リセット発生時にも既存データを保護する設計とし,データの上書きを防止する仕組みを導入しました.その結果,本号機では飛翔データの完全取得を達成することができました.取得した気圧データをもとに高度を算出した結果,到達高度は約65 mであったことを確認しており,飛翔の定量的評価が可能となりました.
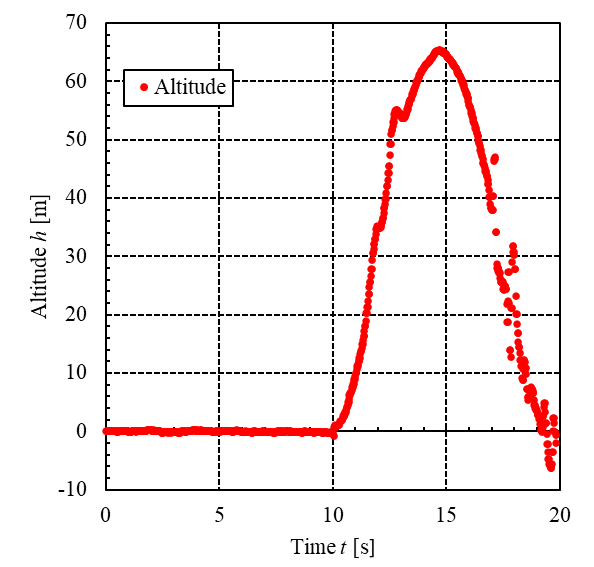
図1 ハイブリッドロケット「暁」の高度グラフ
第二に,電源系の信頼性向上として瞬断対策を実施しました.前号機では着陸後に複数回のリセットが確認されるなど,電源供給の不安定さが課題となっていました.そこで本機体では,電源ラインの電圧降下に対処するため,大容量キャパシタを新たに搭載しました.これにより,一時的な電圧低下が発生した場合でも電源供給を維持できるようになり,長時間の待機を伴う打ち上げ運用においても,安定したシステム動作を実現しています.
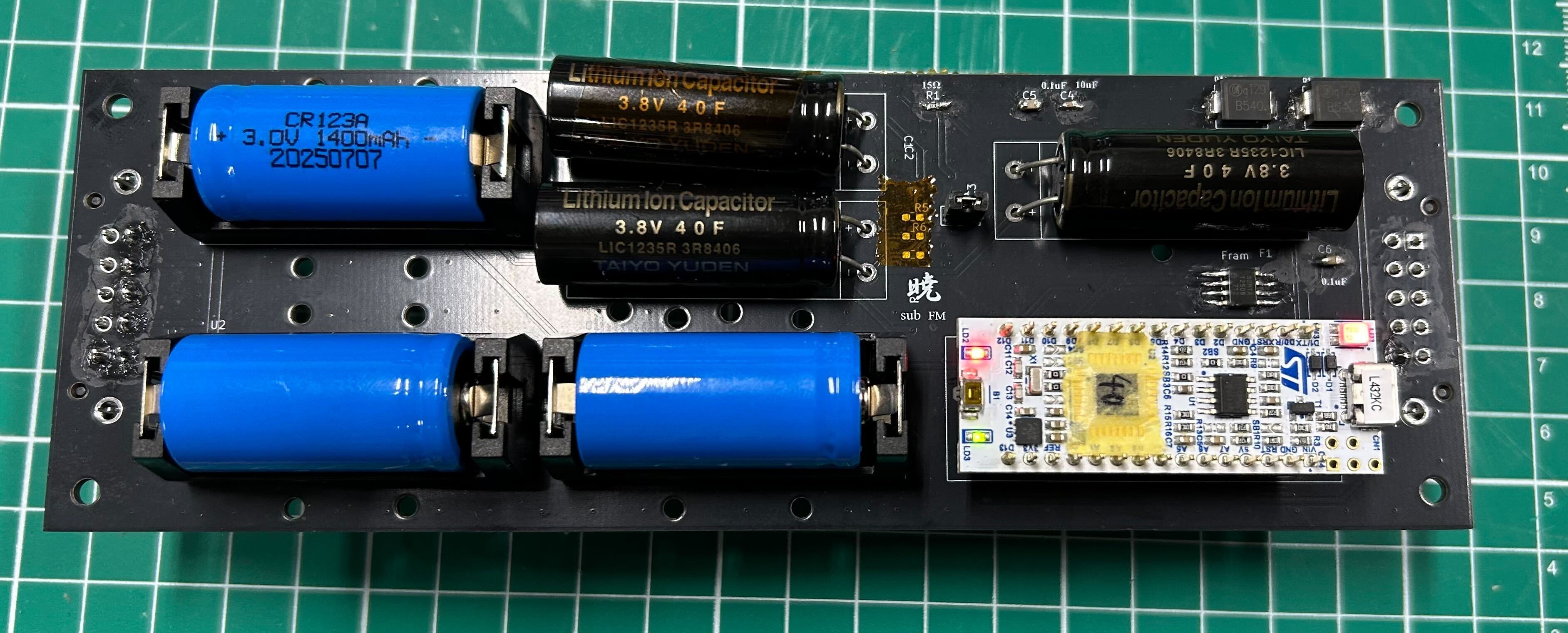
図2 ハイブリッドロケット「暁」の基板
第三に,GPSを用いた位置情報の取得に取り組みました.単体試験においては所期の性能を確認していましたが,システム統合段階において課題が残り,本飛翔においては十分なデータ取得には至りませんでした.本項目については,次号機に向けた重要な改善課題と認識しています.
最後に,次号機に向けた開発について述べます.電装系では,頂点検知アルゴリズムの高精度化およびGPSを含む飛翔データの完全取得を主たる目標としています.これにより,取得データに基づいて推進系のシミュレーションの妥当性を評価できる環境を構築し,機体全体の設計精度向上に寄与することを目指しています.今後とも,取得データの高精度化と,システムの信頼性向上に取り組み,機体全体の性能向上に貢献してまいります.引き続きご支援のほどよろしくお願い申し上げます.
航空宇宙工学科 4年 坂本匠