SSSRCだより
2022年12月5日
SSSRCだより2022年12月号
ディプロイメントスイッチ
落ち葉が風に舞う頃となり、朝晩がひときわ冷え込むようになりました。皆様いかがお過ごしでしょうか。修士1年の金光です。
私が所属する衛星プロジェクトの構造系では現在、OMUSAT-Ⅲで使用するディプロイメントスイッチの検討をタスクの一つとして行っています。しかしながらディプロイメントスイッチにはひろがり(OPUSAT-Ⅱ)の際も悩まされた(振動試験から帰ってきたら曲がっていて穴から出てこないなどなど)ように、なかなか最適な案を出すことが難しく、現とりまとめの逢坂君をはじめB2、B3を中心に毎週案を煮詰めている最中です。
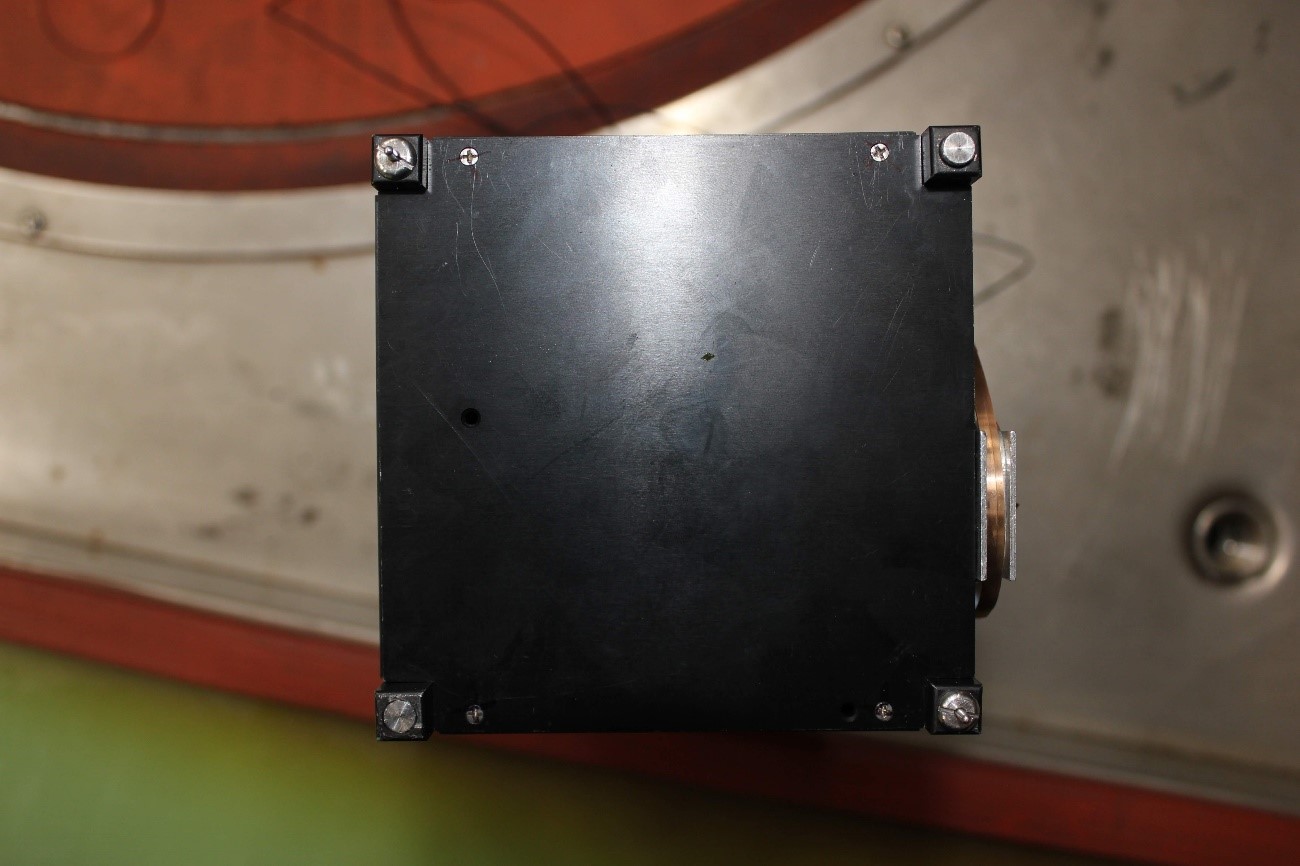
図1 ひろがり(OPUSAT-Ⅱ)のディプロイメントスイッチ(右上&左下)
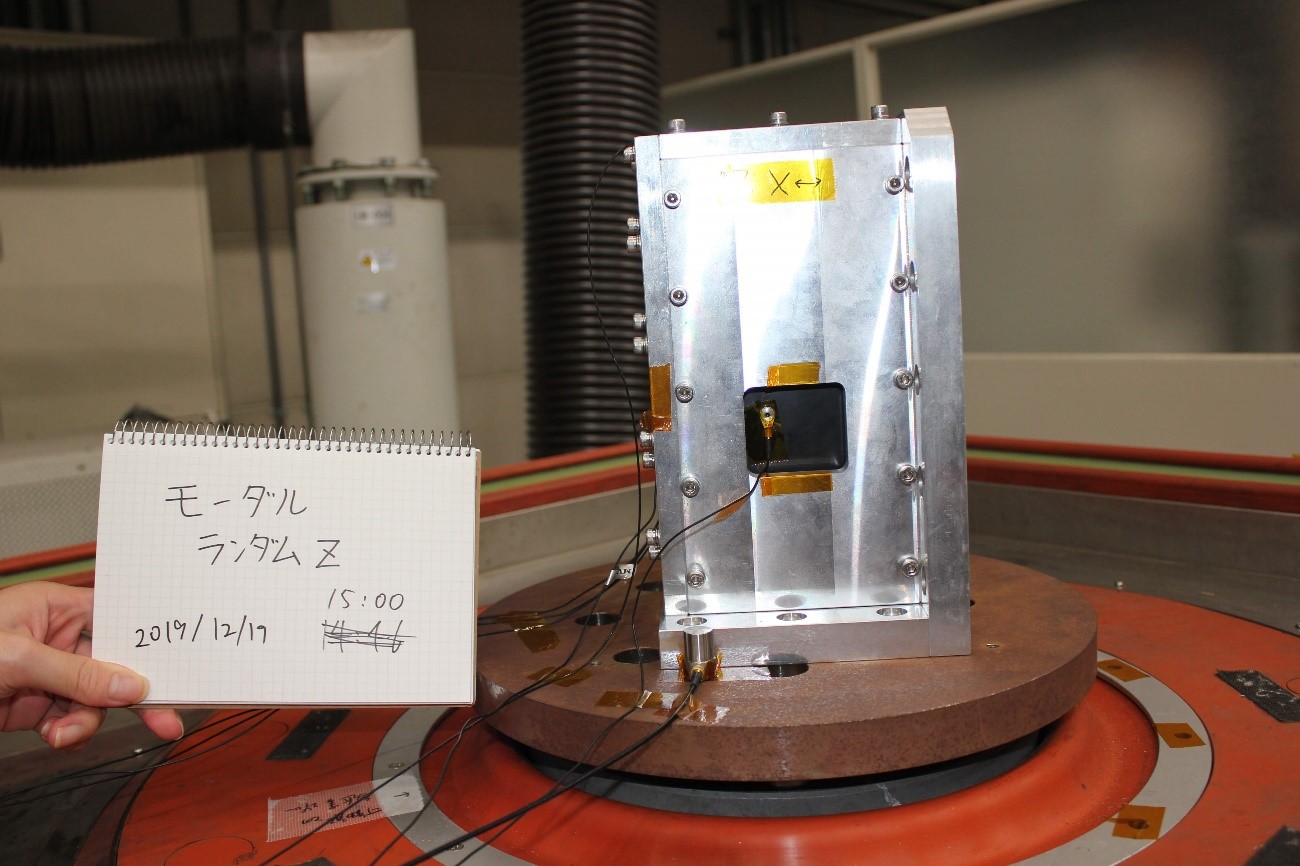
図2 ひろがり(OPUSAT-Ⅱ)の振動試験の様子
課題点としては、
・振動により変形してしまったときにスイッチが構体本体と擦れてしまい復元しにくくなる
・マイクロスイッチの押し方etc.
などあり、現状ではいくつか案を出し、モデルを作って解析していくという段階のため今後さらに議論していく必要がありそうです。
構造系ではこれまで述べたディプロイメントスイッチだけではなくOMUSAT-Ⅲ開発においてミッション部の設計、アンテナ展開付近の設計(溶断機構など)を同時進行で行っており、これから年末に近づくにつれて各々多忙な中でより良い衛星を開発できるように努力していく所存です。
機械系専攻機械工学分野 修士1年 金光宏武
白鷺祭 OPEN LABに参加しました
どうも、B4の松本です。
4年生にもなるとほとんど授業がないので、曜日感覚が狂ってきて、平日に休んで休日に研究するなんて1週間になりがちです。この文章も、祝日の夜に研究室でワールドカップを見ながら書いています。
今回私が書かせていただくのは、11月6日に中百舌鳥キャンパスで行ったOPEN LABについてです。旧府立大の学園祭、白鷺祭では学内の研究室が公開実験や展示を行うOPEN LABという企画があります。そんなOPEN LABに今年度はSSSRCから出展しました。内容としてはA5棟の屋内での活動紹介および、グラウンドでのモデルロケットの打ち上げ実験でした。(モデルロケットについての説明:https://www.ja-r.net/20210213_fly_a_rocket%20.pdf)
前者はセンター全体で運営し、後者についてはCOLOURSロケットプロジェクトが中心となり準備・運営を行いました。学生課や指導教員への申請の段階で、安全な打ち上げができることを示す書類が必要ということで、打ち上げ手順(シーケンスと呼んでます)や安全対策を説明する書類の作成が求められました。これまでは当然のように行っていたことを改めて文面にするのは意外と難しく、燃焼系のメンバーは深夜まで四苦八苦していました。また、ロケットの機体を作成したメンバーは、安全に打ち上げをしながらもどうやって来場者を楽しませるかを考えながら、それぞれ個性あるロケットを作りました。
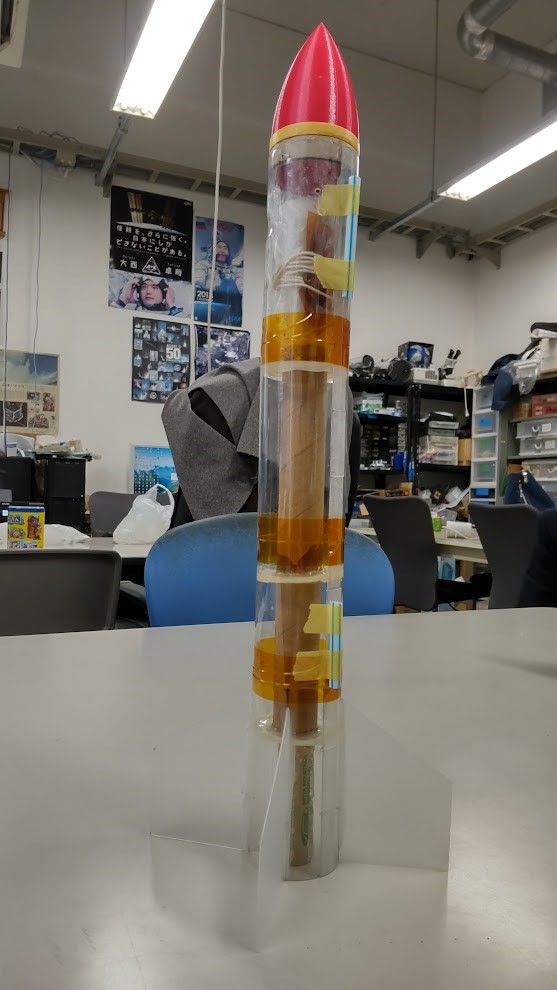
説明がしやすいように側面を透明にし、内部構造が見えるロケット
(作成者は徹夜で作っていたため、打ち上げ前に力尽きました)
そして、当日の打ち上げでは6機のロケットの打ち上げにのべ800人もの方が見学に来てくださいました!予想をはるかに上回る人数に来場していただいたため、誘導や説明が十分にできない、(安全のためには仕方のない面もありますが、)待ち時間が長くなってしまい飽きてしまう方がいらっしゃった、といった課題もあり、次回があるのであれば、さらに改善の余地はあると考えています。
最後になりますが、来場してくださった方、準備や当日の運営をしてくださった方、ありがとうございます。最初は何を目的にやるのかが明確でなかった部分もありましたが、メンバーからの評判も前向きなものが多く、私自身もみんなでロケットを見つめて、打ち上げ後には自然と拍手が起こる光景に感動しました。今回あるいは今後の当センターの活動を見て宇宙への興味を高めてくれる人がいたらこれ以上嬉しいことはないと思います。

A5棟での活動紹介および展示

屋外での打ち上げ(左端にあるサッカーゴールと小屋の間あたりの人がいる所が打ち上げ射点です)
航空宇宙工学課程4年 松本晃宜
姿勢の制御方法に関して
こんにちは、姿勢系の学部3年の高井と申します。
まず姿勢系が何をするのかを簡単に説明すると、衛星の現在の姿勢を計算したり、衛星の向きを安定させたり、衛星をある特定の向きに向けたりする役割があります。
今日は衛星の制御方法である受動制御と能動制御に関して、過去の衛星で行ったこと、現在学習していることを書いていきたいと思います。
受動制御とは、設計を工夫したり、永久磁石を搭載したりすることによって、衛星の姿勢を安定させる方法です。この方法では、センサーなどで外部の状況を測定すること、アクチュエータなどで衛星を能動的に回転させる必要はありません。私たちが作った2代目の衛星である「ひろがり」では受動制御を用いており、永久磁石を搭載していました。地球には図1のように地磁場があるので、図2の永久磁石の磁力との作用で、衛星の姿勢を安定させることができます。
能動制御とは、センサーなどで外部の状況の測定を行い、アクチュエータで衛星に回転の力を加え、姿勢を安定させる方法です。能動制御にもいろいろな方法があるのですが、現在私たちは磁気トルカに関して学習しています。磁気トルカとは簡単に説明すると、コイルに電流を流す装置のことです。コイルに電流を流すと、図3のように磁力が発生します。この磁力と地球磁場との作用で、衛星に回転する力を与えて、能動的に衛星の姿勢を安定させることができます。
以上で書きたい内容を書くことができました。最後まで読んでいただきありがとうございました。今後も開発を頑張っていきたいと思います!
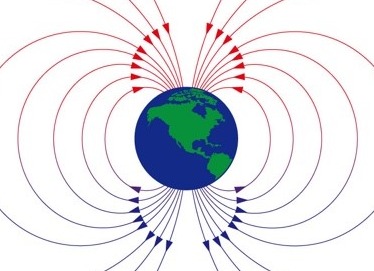
図1 地球の磁場
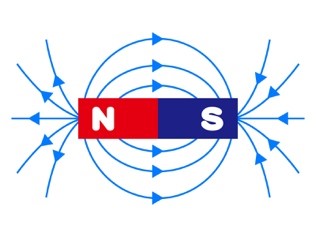
図2 永久磁石
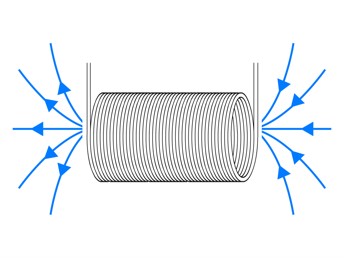
図3 コイルによる磁力
電子物理工学課程 学部3年 高井亮汰