Research News
Oct 2, 2025
- Engineering
The importance of a leader–follower relationship for performing tasks
Having a good leader–follower relationship matters, but only when people spontaneously choose their roles
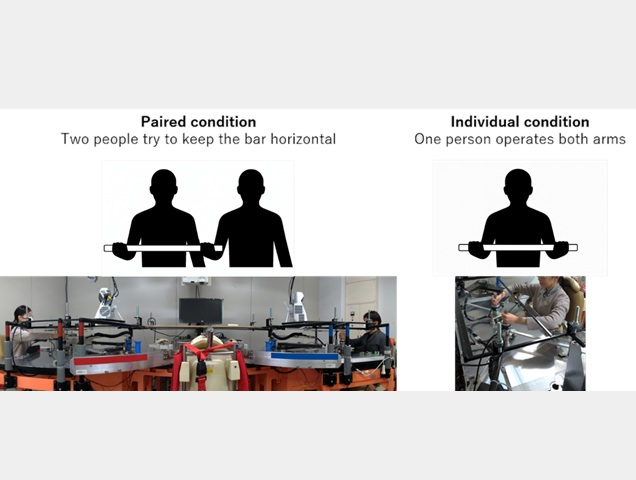
Keeping a rod horizontal using robot arms
Left image shows the paired condition where two people try to keep the rod horizontal in virtual space by operating a robot arm. Right shows the solo condition where one person operates both arms.
Credit: Osaka Metropolitan University
As most of us have experienced, when multiple people work together, things sometimes turn out better than doing the same task alone. Then, there are the other times, when cooperation actually seems to hinder progress, making things much more inefficient.
To understand why this ‘cooperative advantage’ manifests in some cases but not in others, a research group led by Assistant Professor Asuka Takai of the Graduate School of Engineering at Osaka Metropolitan University conducted a task where participants used a robotic arm to transport a rod while keeping it horizontal. The participants were told that the task would stop if the rod’s tilt exceeded a certain threshold. They compared performance between groups of two people working together and people performing the task alone.
To examine the effect of teamwork, the group created two conditions. In the ‘symmetric’ condition, the axis of the rod was centered, meaning the task could be equally split between the two arms. In the other ‘asymmetric’ condition, the rotation axis was off-center because the arms were different lengths. This meant that the participant assigned the shorter arm typically had to lead the one assigned the longer arm.
Under the asymmetric condition, the paired participants learned to adjust their movements with each trial to minimize the tilt of the rod. A natural division of roles emerged, with one partner taking the lead and the other providing support, leading to superior performance by the pairs compared to the individuals.
On the other hand, under the symmetric conditions, no division of roles was observed between partners. Under these conditions, pairs that did not exhibit clear role differences required more transportation time and trials than individuals.
Overall, pairs outperformed individuals when the two participants naturally assumed different roles, whereas individuals performed better than pairs when no such role differentiation occurred.
“The study confirmed that when a ‘leader–follower’ relationship naturally emerges under physically asymmetric conditions, cooperative performance improves,” Professor Takai explained. “Our findings suggest that role specialization, rather than paired interaction per se, was a key factor underlying superior performance.”
The group hopes that future research will explore how asymmetric dynamics, which foster leader–follower dynamics, could similarly enhance performance in rehabilitation and human–robot settings.
“This discovery is expected to be applied to collaborative design between humans and robots,” Professor Takai said. “A robot needs to know when to take on a task itself or hand it over to a human, which may require understanding subtle differences in how each can contribute to the task.”
The study was published in The International Journal of Robotics Research.
Funding
The authors received the following financial support for the research, authorship, and/or publication of this article: National Science Foundation grant [BCS-1827752], the Japan Agency for Medical Research and Development (JP22he2202017), the Commissioned Research of National Institute of Information and Communications Technology (18701), the Kayamori Foundation of Informational Science Advancement, the New Energy and Industrial Technology Development Organization (JPNP20006), the Innovative Science and Technology Initiative for Security, and Acquisition, Technology & Logistics Agency (JPJ004596).
Paper information
Journal: The International Journal of Robotics Research
Title: Role specialization enables superior task performance by human dyads than individuals
DOI: 10.1177/02783649251363274
Authors: Asuka Takai, Qiushi Fu, Yuzuru Doibata, Giuseppe Lisi, Toshiki Tsuchiya, Keivan Mojtahedi, Toshinori Yoshioka, Mitsuo Kawato, Jun Morimoto, Marco Santello
Published: 25 August 2025
URL: https://doi.org/10.1177/02783649251363274
Contact
Asuka Takai
Graduate School of Engineering
Email: atakai[at]omu.ac.jp
*Please change [at] to @.
SDGs

