NEWS
2025年11月12日
- 活動報告
🛳️ 挑戦の航路 Vol.2 ― 技術で挑む学生たち 「スーツケースから生まれた自律船GEMBU」
1. 「スーツケースに収まる」日本発の挑戦

GEMBUチームの設計思想は、初期段階から明確でした。「世界を旅するための自律船」を作ることです。
船体は海外遠征を想定し、スーツケース1つに収まるサイズを目標に設計されました。 軽量化と強度を両立するため、船体はFRP(ガラス繊維樹脂)と3Dプリントパーツの複合構造。内部にはスタイロフォームを充填して作成しました。
「空港で預けられる最大サイズに収まるよう、ミリ単位で分割設計しました。」
(船体担当・田口新風さん/東京大学大学院)
この発想がGEMBU最大の特徴でした。
2. モジュラー設計と冗長性 ― “壊れにくく直せる”を科学する
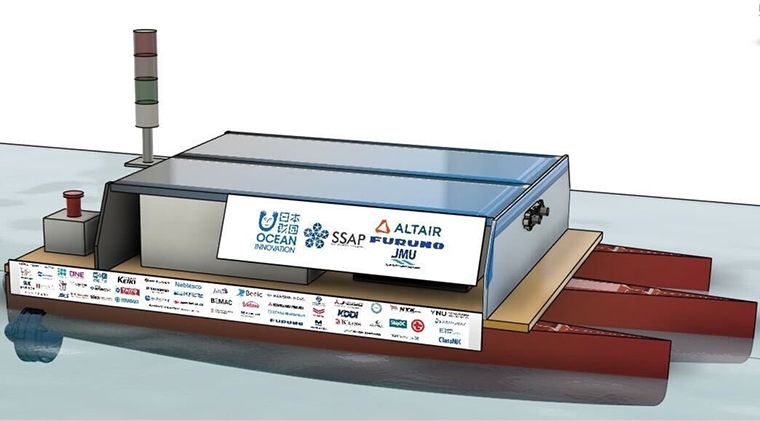
GEMBUの船体は、3本の細長い船体を並べた「トリマラン構造」です。 各船体は共通の形状を持ち、冗長性を確保しています。 推進力にはT200スラスターを4基搭載し、どの1基が故障しても姿勢制御が可能な設計です。
モジュラー設計を採用したのは、「現地でのトラブルに強い船を作る」ためです。輸送・組立・修理・交換の全プロセスを学生自身で完結できるようにしました。
「完成後の試験で、想定外の水流でも安定して姿勢を保てたとき、設計思想が正しかったと実感しました。」
(大阪公立大学・中村奏瑛さん)
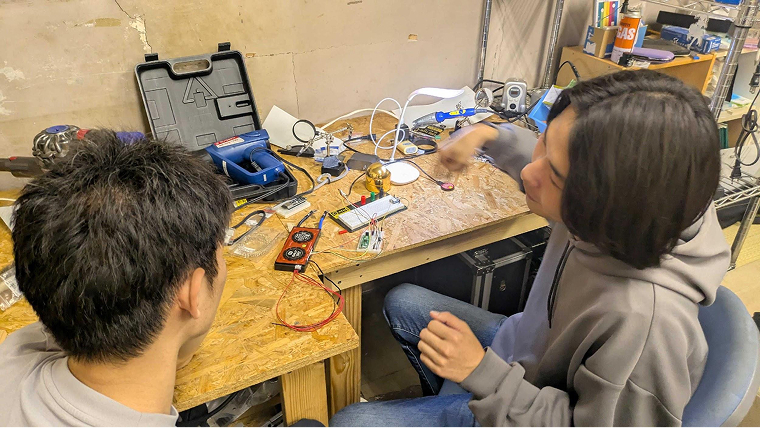
3. 電装 ― 見えない“血管”をつくる仕事
GEMBUの電装設計を担ったのは、東京海洋大学の石川采燈さん(M2)と松原健太郎さん(B2)です。
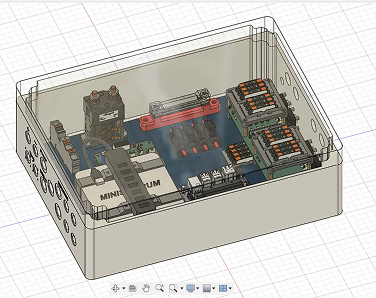
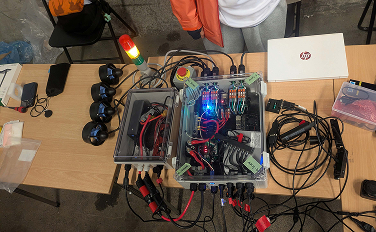
彼らの仕事は、機体の“生命線”とも言える電源・通信系統の設計と実装とのこと。センサー、スラスター、バッテリー、通信機器をすべて安全に動かすため、防水ケース内の電流経路やリレー制御を細部まで最適化しました。加えて、非常時の緊急停止システム(E-Stop)も実装しています。
「電装は地味ですが、1本のケーブルが断線すれば船は動きません。配線の美しさと安全性を両立させるのが僕らの誇りです。」
(石川さん)
実際、大会ではこの電装品質が審査員からも高く評価され、 「配線が最も美しいチームのひとつ」とコメントを受けられました。
4. ソフトウェア ― 0から作った“海の脳”
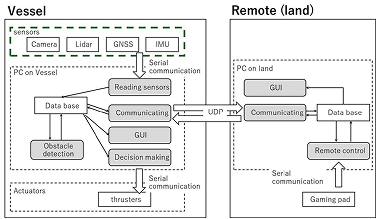
制御システムは、Pythonで完全自作。 既存の自律航行ライブラリには頼らず、
センサー → 認識 → 意思決定 → 制御の一連をすべて学生が書き上げました。
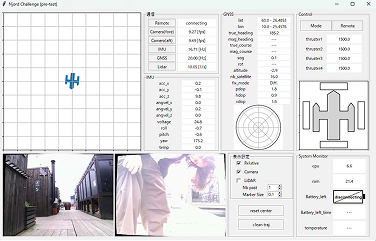
・船上PCがカメラ・GNSS・加速度計・LiDARをリアルタイムで取得
・データを陸上PCとUDP通信で共有
・GUI上で状態表示とスラスター制御を可視化
・ゲーミングパッドでのリモート操縦モードも搭載
「何もない状態から動くまで、全部Pythonで組み上げたんです。初めてGUIが反応した瞬間、みんなで拍手しました。」
(大阪公立大学・吉岡舜さん)
このソフトウェアは「陸上操作モード」「自律制御モード」の切替が可能で、 デバッグ性・信頼性を両立させる工夫も見られました。
5. 直前テストと“本番の壁”
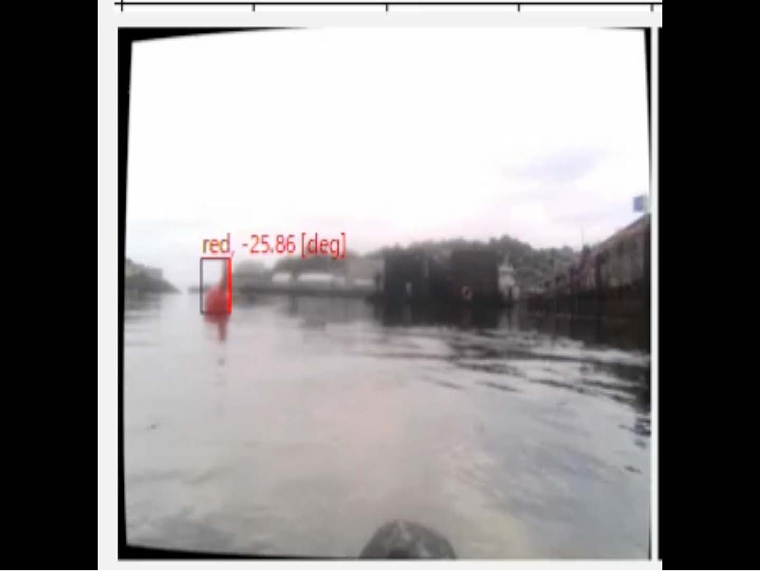
現地で実施した事前の検証では、完璧に航行を実現。
カメラ認識から航路生成、スラスター制御まで想定通りに動作しました。
だが本番では前方カメラが白飛びし、ブイを検知できず制御不能になりました。 通信の遅延も重なり、船は途中で停止。 GEMBUのアルゴリズムは理論上正しかったが、環境光と通信環境の差という現実が立ちはだかりました。
「悔しかったけれど、これが“現場”だと学びました。 自動運航は机上じゃなく、海の上で育つ技術です。」
(吉岡さん)
6. “チームでつくる”という力
GEMBUの最大の成果は、単に船を作ったことではない。遠く離れた東京・大阪の学生たちが、オンラインで設計・製作・テストを進めたという組織運営力そのものにあります。
開発中は、Slack・Google Drive・GitHubを活用し、「毎週の定例」「夜間作業」「分報チャンネル」などを駆使して連携。ノウハウは文書化され、次年度チームへと継承されることになりました。
「チームが分散していても、想いはひとつ。世界大会という目標が、みんなを繋いでくれました。」
(田口さん)
7. 次への改良と未来

現在、GEMBUチームは2026年大会に向けた改良を進行中。 課題だったカメラの露出制御・通信安定化・航路予測モデルの改善に着手しており、 AIベースの環境認識を導入予定です。
「次は、“完全自律航行での完走”を目指します。」(田邊さん)

