最新の研究成果
ヘビ型ロボットの地形適応性を向上 ~最適な動きを学習させ省エネを実現~
2026年3月17日
- 工学研究科
- プレスリリース
発表者
大阪公立大学大学院工学研究科 山野 彰夫講師、鈴木 里美大学院生(博士前期課程2年)、木元 剛士大学院生(博士後期課程3年)
概要
ヘビ型ロボットは、狭い場所やでこぼこ道でも移動ができますが、常に複数のモーターを動かす必要があるため、消費電力が大きいという課題がありました。
本研究グループは、でこぼこ道では従来の“うねり運動”で移動し、整地では“転がり移動”に切り替えるヘビ型ロボットを開発し、移動効率の向上に成功しました。また、深層強化学習を用い、路面の変化に対応した走行を実現するコントローラーを設計しました。これにより、ヘビ型ロボットの直進性とバッテリー駆動時間の向上が期待できます。
本研究成果は、2026年1月29日にロボティクスと自律システムの研究に関する国際学術誌「Robotics and Autonomous Systems」にオンライン掲載されました。
ポイント
- ヘビ型ロボットを、でこぼこ道では従来の“うねり運動”で移動させ、整地では平行二輪状態に変形させて“転がり移動”に切り替えることで、移動効率の向上に成功。
- 深層強化学習を用い、路面の変化に対応した走行を実現するコントローラーを設計し、直進性が向上。
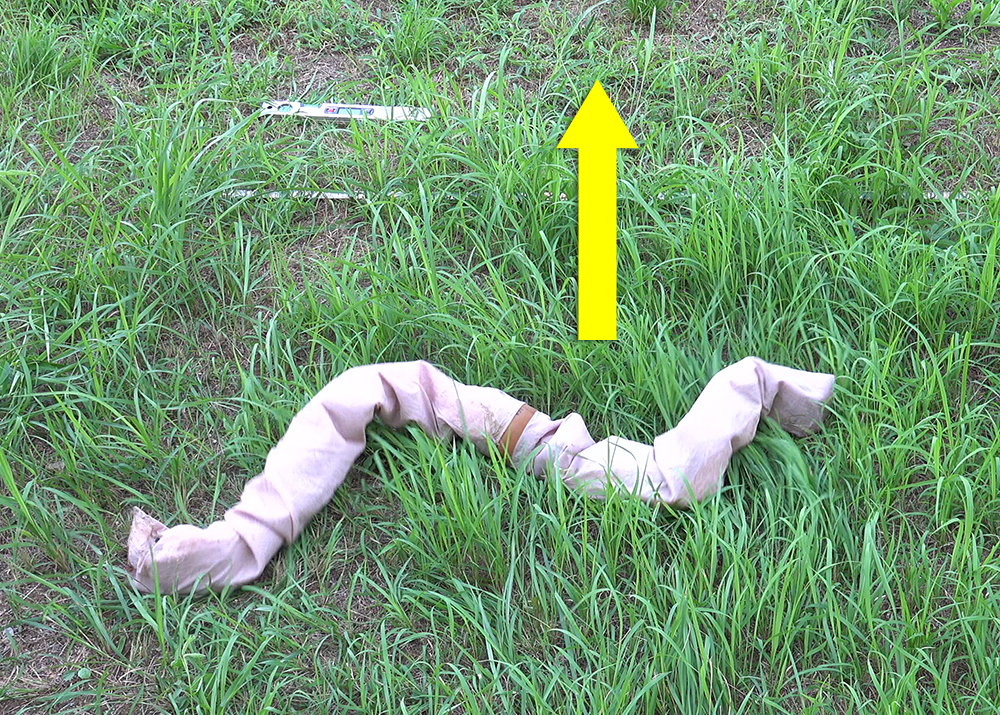 (a) うねり運動
(a) うねり運動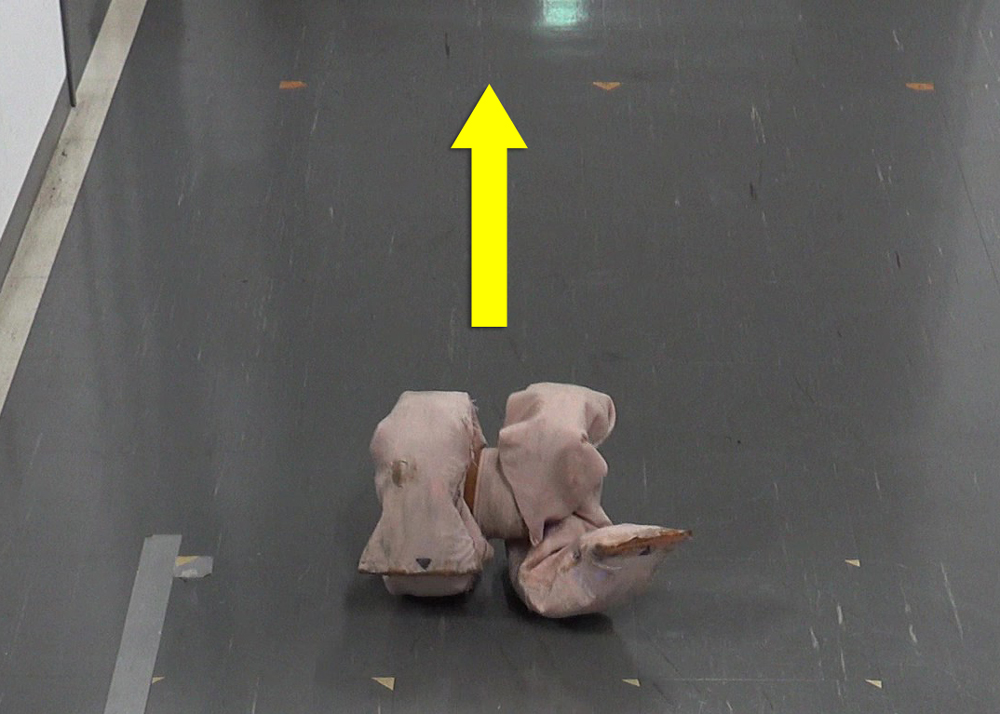 (b) 転がり移動
(b) 転がり移動図:本研究で提案した(a)“うねり運動”と(b)“転がり移動”を切り替えるヘビ型ロボット
<研究者のコメント>
ヘビ型ロボットの研究は50年以上の歴史がありますが、実用化への課題が多く残っています。本研究では生体のヘビの運動にとらわれず、よりよい動きのロボットの開発を進め、実用化への課題を埋めていきたいと思います。
 山野 彰夫講師
山野 彰夫講師
研究の背景
ヘビ型ロボットは、細長い体を活かして、狭い場所、不整地(でこぼこ道)、水面を移動できるため、災害現場および環境探査などの分野で期待されています。しかし、常に複数のモーターを動かすため、バッテリーの消耗が激しいという課題がありました。
研究の内容
本研究では、路面環境に応じて従来の“うねり運動”と“転がり移動”を切り替えることで、全体の移動効率を向上させる機構、および深層強化学習を用いた“転がり移動”の設計手法を提案しました。ロボットに搭載されている「高トルク※だが動く速さに限界があるモーター」の特性をふまえ、モーターの駆動速度の制限を考慮した深層強化学習による設計手法を導入し、移動速度が大きく、直進性の高い転がり移動をコンピューターの中の仮想空間で探索しました。そして、シミュレーションおよび実験の両方において、直進性と移動速度を定量的に評価しました。また実験において、整地では“うねり運動”に対して“転がり移動”の方が、消費電力当たりの移動速度が約2倍向上することを確認しました。
期待される効果・今後の展開
提案した機構により、路面環境に応じて適切に“うねり運動”と“転がり移動”を切り替えることで、バッテリー駆動のヘビ型ロボットの運用時間を向上させることが期待できます。今後は、ロボットが自律的に状況を判断して動きを切り替える機能や、正確なナビゲーション技術の開発を進めていきます。
資金情報
本研究は、マツダ財団および科学研究費補助金基盤研究(C)(課題番号JP25K07667)の支援を受けて実施しました。
用語解説
※ 高トルク:トルクはモーターの「物体を回転させる力の強さ」のこと。高トルクのモーターは、重い回転負荷を回すことができる。
掲載誌情報
【発表雑誌】 Robotics and Autonomous Systems
【論文名】 Deep reinforcement learning-based design with observation buffer of rolling motion for snake-like robots
【著者】 Akio Yamano, Satomi Suzuki, Tsuyoshi Kimoto, and Takashi Iwasa
【掲載URL】 https://doi.org/10.1016/j.robot.2026.105370
研究内容に関する問い合わせ先
大阪公立大学大学院工学研究科
講師 山野 彰夫(やまの あきお)
TEL:072-254-9172
E-mail: yamano_aero[at]omu.ac.jp
※[at]を@に変更してください。
報道に関する問い合わせ先
大阪公立大学 広報課
担当:谷
TEL:06-6967-1834
E-mail:koho-list[at]ml.omu.ac.jp
※[at]を@に変更してください。
該当するSDGs
