最新の研究成果
トマト収穫ロボットのAI学習を自動化~農業現場の人手不足解消に寄与する新技術を開発~
2026年3月31日
- 工学研究科
- プレスリリース
発表者
大阪公立大学大学院工学研究科 後地 拓真大学院生、藤永 拓矢助教
概要
農業ロボットの開発には大量のデータが必要ですが、その多くはこれまで果実の位置や成熟度を人が一つ一つラベル付けするなど手作業で作成されており、手間と時間がかかるという課題がありました。
本研究グループは、トマト収穫ロボットのAI学習に必要なデータセット(画像とラベル)を仮想環境※内で自動生成する新たな手法を開発しました。本手法は、現実環境(農園)で取得した情報をもとに農業現場を仮想環境に再現し、その中で現実に近い画像を多様に生成できます。さらに、果実の位置や成熟度などのラベルも自動的に作成できるため、AI学習用データセットを短時間で効率的に構築することが可能です。
本研究成果は、2026年3月5日に国際学術誌「Smart Agricultural Technology」にオンライン掲載されました。
ポイント
- トマト収穫ロボットのAI学習用データセットを自動生成する手法を開発。
- 高精度AIを実現するために必要なデータセットの作成条件を明らかに。
- 手作業が中心だったデータセット作成を効率化し、作業時間を大きく短縮することが可能に。
<研究者コメント>
農作物を見つける技術は、農業ロボットにとって欠かすことのできない重要な技術です。AIによる物体検出には学習のための大量のデータが必要です。しかし、その多くはこれまで人が手作業で作成していました。そこで本研究では、仮想環境を用いてデータを自動生成する方法に取り組みました。本研究の成果が、農業ロボットの研究開発をさらに加速させる一助となれば幸いです。
 後地 拓真大学院生、藤永 拓矢助教
後地 拓真大学院生、藤永 拓矢助教研究の背景
農業現場では人手不足が深刻な課題となっており、特に農作物の収穫作業は大きな負担になっています。そこで、ロボットによる自動収穫が注目されています。例えばトマト収穫ロボットは、カメラを使ってトマトを見つけて収穫します。ロボットがトマトを正しく見つけるためには人工知能(AI) が活用されていますが、収穫ロボットのAI学習には大量のデータが必要です。このデータには、農園内の画像とその画像の中の「どこにトマトがあり、どのくらい熟しているか」という情報(ラベル)が含まれています。つまり、画像とラベルを組み合わせた「データセット」を作る必要があります。しかし、これまでは画像ごとに人が手作業でラベル付けしており、多くの時間がかかっていました。また、実際の農業現場で大量の画像を集めることも簡単ではありません。そこで本研究では、AIの学習に必要な画像やデータセットを自動的に生成することを目的としました。
研究の内容
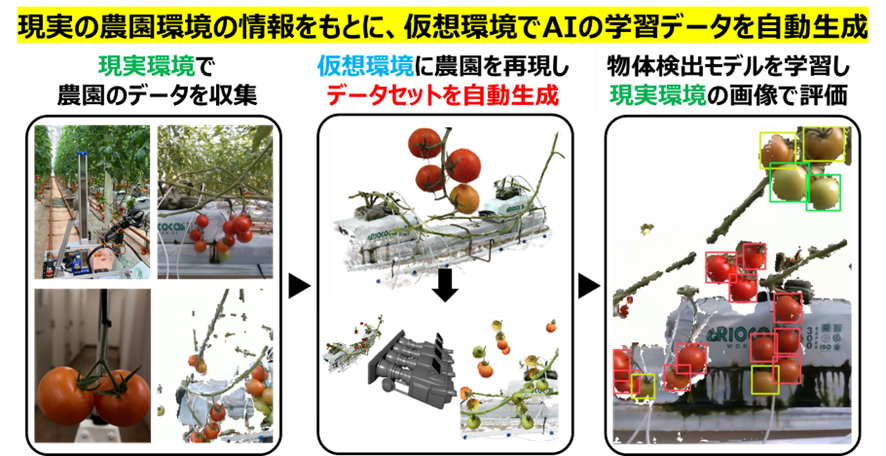
本研究では、仮想環境の中に農業現場を再現し、画像を自動的に収集して、AIの学習に必要なデータセットを自動で構築する方法に着目しました。まず、実際の農業現場で取得した農園内の画像を用いて、トマトや周囲の環境の3次元モデルを作成します。次に、その3次元モデルを仮想環境に配置し、農園の様子を再現します。仮想環境には、ロボットに搭載されているカメラと同じ条件も再現します。さらに、トマトの位置や成熟度を設定し、さまざまな明るさの条件で画像を撮影します。これにより、現実に近い画像を大量に自動生成することができます。また、トマトの位置情報をもとにAIの学習に必要な「画像の中のどこにトマトがあるか」という情報も自動的に作成し、画像とその情報をまとめたデータセットを構築します。最後に、そのデータセットを用いてAIを学習させます。
そして、学習したAIがトマトをどれだけ正しく見つけられるかを評価するとともに、仮想環境の条件を変えた場合の検出精度への影響も調べました。例えば、トマトの3Dモデルの形状や明るさの条件、データ数の違いなどを比較することで、どのような条件でデータセットを作るとAIの精度が高くなるかを明らかにしました。本研究により、手作業によるデータ作成にかかる時間を大きく削減することができました。
期待される効果・今後の展開
本研究成果をトマト以外の作物にも応用することで、さまざまな農作物の自動収穫技術の発展につながると考えられます。今後は、より多様な環境や作物を再現できる仮想環境を構築し、農業ロボットのさらなる知能化を目指します。
資金情報
本研究は、JSPS科研費JP25K18330の支援を受けて実施しました。
用語解説
※ 仮想環境:コンピュータの中に実際の農園や物体の様子を3次元で再現し、実験やデータ作成を行える人工的な環境のこと。
掲載誌情報
【発表雑誌】 Smart Agricultural Technology
【論文名】 Automatic generation of synthetic data and object detection datasets in virtual environments based on tomato-harvesting robot vision
【著者】 Takuma Ushiroji, Takuya Fujinaga
【掲載URL】 https://doi.org/10.1016/j.atech.2026.101947
研究内容に関する問い合わせ先
大阪公立大学大学院工学研究科
助教 藤永 拓矢(ふじなが たくや)
TEL:072-254-9211
E-mail:tfujinaga[at]omu.ac.jp
※[at]を@に変更してください。
報道に関する問い合わせ先
大阪公立大学 広報課
担当:久保
TEL:06-6967-1834
E-mail:koho-list[at]ml.omu.ac.jp
※[at]を@に変更してください。
該当するSDGs
